Средняя вероятность ошибки в соответствии
с формулой (2.4)зависит от
вероятности неправильного приема
сигналовS1иS2 .
Однако при применении идеального
приемника Котельникова канал связи
предполагается симметричным, т.е.P(y2/S1)=P(y1/S2).
Поэтому формула(2.4)упрощается.
В нашем случаеPош=P(y2/S1).
Эту формулу мы возьмем за основу при
определении вероятности ошибки в
приемнике Котельникова.
Допустим, нам известно, что на вход
приемника поступает сигнал S1(t).
В этом случае, в соответствии с правилом
решения приемника Котельникова(4.4),
должно выполняться следующее неравенство
_ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _
[x(t) — S1(t)]2
< [x(t) — S2(t)]2.(7.1)
Однако, несмотря на поступление сигнала
S1(t), при сильной помехе
знак неравенства может измениться на
противоположный, в результате чего
приемник вместо сигналаS1(t)выдает сигналS2(t), то есть
произойдет ошибка. Вероятность искажения
сигналаS1(t)можно
определить как вероятность изменения
знака неравенства(7.1), если
подставить тудаx(t) = S1(t)
+ n(t).
После очевидных преобразований получаем
_ _ _ _
_ _ _ _ _ _ _ _ _ _ _
pош = P(y2/S1)
= P{n2(t) > [n(t) + S1(t)
— S2(t)]2} =
_ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
=P{0 > 2 n(t) [S1(t)
— S2(t)]
+ [S1(t)
— S2(t)]2}
=
= P{1/T![]() 2n(t)
2n(t)
[S1(t)
— S2(t)]dt
+ 1/T![]() [S1(t)
[S1(t)
— S2(t)]2dt
< 0}.
Сокращая на Т,
получаем
pош
= P{![]() n(t)
n(t)
[S1(t)
— S2(t)]dt
+ 0,5![]() [S1(t)
[S1(t)
— S2(t)]2dt
< 0}.
Обозначим в этом выражении:
![]() n(t)
n(t)
[S1(t) — S2(t)]dt =
, ![]() [S1(t)
[S1(t)
— S2(t)]2dt = Еэ
(7.2)
С учетом этих обозначений вероятность
искажения сигнала S1будет
определятся формулой
Pош = P{
< 1/2 Eэ}.
(7.3)
В этой формуле Eэ— энергия
разности сигналовS1(t)—S2(t), называемая«эквивалентной
энергией», а- некоторая случайная величина, зависящая
от помехиn(t)и разности сигналовS1(t)—S2(t).
Так как помеха n(t)имеет гауссовское
распределение, а величинаесть результат линейной операции надn(t), то и величинараспределена также по гауссовскому
закону

Тогда, в соответствии с (7.3)
 (7.4)
(7.4)
где
 — табулированный интеграл вероятностей.
— табулированный интеграл вероятностей.
Можно доказать,что при флюктуационной
помехе на входе приемника со спектральной
плотностью помехи N0дисперсия
величиныопределяется
формулой2=N0Eэ /2.
Подставляя это значение 2в(7.4)получим окончательно (7.5)
(7.5)
Таким образом, в приемнике Котельникова
вероятность ошибки полностью определяется
эквивалентной энергией сигналов и
спектральной плотностью помехи и от
полосы пропускания приемника не зависит.
На практике обычно на входе приемника
все-таки ставят полосовой фильтр, так
как в канале связи, кроме флюктуационных
помех, часто встречаются также другие
помехи (от соседних каналов, импульсные
и др.)
Формула (7.5)является достаточно
общей. Для конкретных видов модуляции
в канале связи эту формулу видоизменяют,
для чего вычисляют соответствующее
значениеEэ. При этом для
различных видов модуляцииEэопределяют через энергию одного из
сигналов, а в окончательную формулу
вводят величину
h20
= E1/N0 . (7.6)
Следовательно, в приемнике Котельникова,
который также называется когерентным(в приемнике известна фаза принимаемого
сигнала)вероятность ошибки зависит
не от отношения мощности сигнала к
мощности помехи, а от отношения энергии
сигнала к спектральной плотности помехи.
Это позволяет, не меняя мощности сигнала,
увеличить его энергию за счет увеличения
его длительности, что дает дополнительные
возможности в построении помехоустойчивых
систем связи.
Соседние файлы в папке CHIN
- #
- #
- #
- #
Средняя вероятность ошибки в соответствии с формулой (2.4) зависит от вероятности неправильного приема сигналов S1 и S2 . Однако при применении идеального приемника Котельникова канал связи предполагается симметричным, т.е. P(y2/S1) = P(y1/S2). Поэтому формула (2.4) упрощается. В нашем случае Pош = P(y2/S1). Эту формулу мы возьмем за основу при определении вероятности ошибки в приемнике Котельникова.
Допустим, нам известно, что на вход приемника поступает сигнал S1(t). В этом случае, в соответствии с правилом решения приемника Котельникова (4.4), должно выполняться следующее неравенство
[x(t) — S1(t)]2 < [x(t) — S2(t)]2 . (7.1)
Однако, несмотря на поступление сигнала S1(t), при сильной помехе знак неравенства может измениться на противоположный, в результате чего приемник вместо сигнала S1(t) выдает сигнал S2(t), то есть произойдет ошибка. Вероятность искажения сигнала S1(t) можно определить как вероятность изменения знака неравенства (7.1), если подставить туда x(t) = S1(t) + n(t).
После очевидных преобразований получаем
Pош = P(y2/S1) = P{n2(t) > [n(t) + S1(t) — S2(t)]2} =P{0 > 2 n(t) [S1(t) — S2(t)] + [S1(t) — S2(t)]2} =
= P{1/T ![]() 2n(t) [S1(t) — S2(t)]dt + 1/T
2n(t) [S1(t) — S2(t)]dt + 1/T ![]() [S1(t) — S2(t)]2dt < 0}.
[S1(t) — S2(t)]2dt < 0}.
Сокращая на Т, получаем
Pош = P{ ![]() n(t) [S1(t) — S2(t)]dt + 0,5
n(t) [S1(t) — S2(t)]dt + 0,5 ![]() [S1(t) — S2(t)]2dt < 0}.
[S1(t) — S2(t)]2dt < 0}.
Обозначим в этом выражении:
![]() n(t) [S1(t) — S2(t)]dt = m ,
n(t) [S1(t) — S2(t)]dt = m , ![]() [S1(t) — S2(t)]2dt = Еэ (7.2)
[S1(t) — S2(t)]2dt = Еэ (7.2)
С учетом этих обозначений вероятность искажения сигнала S1 будет определятся формулой
Pош = P{m < 1/2× Eэ}. (7.3)
В этой формуле Eэ — энергия разности сигналов S1(t) — S2(t), называемая «эквивалентной энергией» , а m — некоторая случайная величина, зависящая от помехи n(t) и разности сигналов S1(t) — S2(t).
Так как помеха n(t) имеет гауссовское распределение, а величина m есть результат линейной операции над n(t) , то и величина m распределена также по гауссовскому закону
Тогда, в соответствии с (7.3)
 (7.4)
(7.4)
где  — табулированный интеграл вероятностей.
— табулированный интеграл вероятностей.
Можно доказать,что при флюктуационной помехе на входе приемника со спектральной плотностью помехи N0 дисперсия величины m определяется формулой s2m = N0Eэ /2.
Подставляя это значение s2m в (7.4) получим окончательно  (7.5)
(7.5)
Таким образом, в приемнике Котельникова вероятность ошибки полностью определяется эквивалентной энергией сигналов и спектральной плотностью помехи и от полосы пропускания приемника не зависит. На практике обычно на входе приемника все-таки ставят полосовой фильтр, так как в канале связи, кроме флюктуационных помех, часто встречаются также другие помехи (от соседних каналов, импульсные и др.)
Формула (7.5) является достаточно общей. Для конкретных видов модуляции в канале связи эту формулу видоизменяют, для чего вычисляют соответствующее значение Eэ . При этом для различных видов модуляции Eэ определяют через энергию одного из сигналов, а в окончательную формулу вводят величину
h20 = E1/N0 . (7.6)
Следовательно, в приемнике Котельникова, который также называется когерентным (в приемнике известна фаза принимаемого сигнала) вероятность ошибки зависит не от отношения мощности сигнала к мощности помехи, а от отношения энергии сигнала к спектральной плотности помехи. Это позволяет, не меняя мощности сигнала, увеличить его энергию за счет увеличения его длительности, что дает дополнительные возможности в построении помехоустойчивых систем связи.
Средняя вероятность ошибки в соответствии с формулой (2.4) зависит от вероятности неправильного приема сигналов S1 и S2 . Однако при применении идеального приемника Котельникова канал связи предполагается симметричным, т.е. P(y2/S1) = P(y1/S2). Поэтому формула (2.4) упрощается. В нашем случае Pош = P(y2/S1). Эту формулу мы возьмем за основу при определении вероятности ошибки в приемнике Котельникова.
Допустим, нам известно, что на вход приемника поступает сигнал S1(t). В этом случае, в соответствии с правилом решения приемника Котельникова (4.4), должно выполняться следующее неравенство
[x(t) — S1(t)]2 < [x(t) — S2(t)]2 . (7.1)
Однако, несмотря на поступление сигнала S1(t), при сильной помехе знак неравенства может измениться на противоположный, в результате чего приемник вместо сигнала S1(t) выдает сигнал S2(t), то есть произойдет ошибка. Вероятность искажения сигнала S1(t) можно определить как вероятность изменения знака неравенства (7.1), если подставить туда x(t) = S1(t) + n(t).
После очевидных преобразований получаем
Pош = P(y2/S1) = P{n2(t) > [n(t) + S1(t) — S2(t)]2} =P{0 > 2 n(t) [S1(t) — S2(t)] + [S1(t) — S2(t)]2} =
= P{1/T ![]() 2n(t) [S1(t) — S2(t)]dt + 1/T
2n(t) [S1(t) — S2(t)]dt + 1/T ![]() [S1(t) — S2(t)]2dt < 0}.
[S1(t) — S2(t)]2dt < 0}.
Сокращая на Т, получаем
Pош = P{ ![]() n(t) [S1(t) — S2(t)]dt + 0,5
n(t) [S1(t) — S2(t)]dt + 0,5 ![]() [S1(t) — S2(t)]2dt < 0}.
[S1(t) — S2(t)]2dt < 0}.
Обозначим в этом выражении:
![]() n(t) [S1(t) — S2(t)]dt = m ,
n(t) [S1(t) — S2(t)]dt = m , ![]() [S1(t) — S2(t)]2dt = Еэ (7.2)
[S1(t) — S2(t)]2dt = Еэ (7.2)
С учетом этих обозначений вероятность искажения сигнала S1 будет определятся формулой
Pош = P{m < 1/2× Eэ}. (7.3)
В этой формуле Eэ — энергия разности сигналов S1(t) — S2(t), называемая «эквивалентной энергией» , а m — некоторая случайная величина, зависящая от помехи n(t) и разности сигналов S1(t) — S2(t).
Так как помеха n(t) имеет гауссовское распределение, а величина m есть результат линейной операции над n(t) , то и величина m распределена также по гауссовскому закону
Тогда, в соответствии с (7.3)
(7.4)
где — табулированный интеграл вероятностей.
Можно доказать,что при флюктуационной помехе на входе приемника со спектральной плотностью помехи N0 дисперсия величины m определяется формулой s2m = N0Eэ /2.
Подставляя это значение s2m в (7.4) получим окончательно (7.5)
Таким образом, в приемнике Котельникова вероятность ошибки полностью определяется эквивалентной энергией сигналов и спектральной плотностью помехи и от полосы пропускания приемника не зависит. На практике обычно на входе приемника все-таки ставят полосовой фильтр, так как в канале связи, кроме флюктуационных помех, часто встречаются также другие помехи (от соседних каналов, импульсные и др.)
Формула (7.5) является достаточно общей. Для конкретных видов модуляции в канале связи эту формулу видоизменяют, для чего вычисляют соответствующее значение Eэ . При этом для различных видов модуляции Eэ определяют через энергию одного из сигналов, а в окончательную формулу вводят величину
h20 = E1/N0 . (7.6)
Следовательно, в приемнике Котельникова, который также называется когерентным (в приемнике известна фаза принимаемого сигнала) вероятность ошибки зависит не от отношения мощности сигнала к мощности помехи, а от отношения энергии сигнала к спектральной плотности помехи. Это позволяет, не меняя мощности сигнала, увеличить его энергию за счет увеличения его длительности, что дает дополнительные возможности в построении помехоустойчивых систем связи.
Средняя вероятность ошибки в соответствии
с формулой (2.4)зависит от
вероятности неправильного приема
сигналовS1иS2 .
Однако при применении идеального
приемника Котельникова канал связи
предполагается симметричным, т.е.P(y2/S1)=P(y1/S2).
Поэтому формула(2.4)упрощается.
В нашем случаеPош=P(y2/S1).
Эту формулу мы возьмем за основу при
определении вероятности ошибки в
приемнике Котельникова.
Допустим, нам известно, что на вход
приемника поступает сигнал S1(t).
В этом случае, в соответствии с правилом
решения приемника Котельникова(4.4),
должно выполняться следующее неравенство
_ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _
[x(t) — S1(t)]2
< [x(t) — S2(t)]2.(7.1)
Однако, несмотря на поступление сигнала
S1(t), при сильной помехе
знак неравенства может измениться на
противоположный, в результате чего
приемник вместо сигналаS1(t)выдает сигналS2(t), то есть
произойдет ошибка. Вероятность искажения
сигналаS1(t)можно
определить как вероятность изменения
знака неравенства(7.1), если
подставить тудаx(t) = S1(t)
+ n(t).
После очевидных преобразований получаем
_ _ _ _
_ _ _ _ _ _ _ _ _ _ _
pош = P(y2/S1)
= P{n2(t) > [n(t) + S1(t)
— S2(t)]2} =
_ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
=P{0 > 2 n(t) [S1(t)
— S2(t)]
+ [S1(t)
— S2(t)]2}
=
= P{1/T![]() 2n(t)
2n(t)
[S1(t)
— S2(t)]dt
+ 1/T![]() [S1(t)
[S1(t)
— S2(t)]2dt
< 0}.
Сокращая на Т,
получаем
pош
= P{![]() n(t)
n(t)
[S1(t)
— S2(t)]dt
+ 0,5![]() [S1(t)
[S1(t)
— S2(t)]2dt
< 0}.
Обозначим в этом выражении:
![]() n(t)
n(t)
[S1(t) — S2(t)]dt =
, ![]() [S1(t)
[S1(t)
— S2(t)]2dt = Еэ
(7.2)
С учетом этих обозначений вероятность
искажения сигнала S1будет
определятся формулой
Pош = P{
< 1/2 Eэ}.
(7.3)
В этой формуле Eэ— энергия
разности сигналовS1(t)—S2(t), называемая«эквивалентной
энергией», а- некоторая случайная величина, зависящая
от помехиn(t)и разности сигналовS1(t)—S2(t).
Так как помеха n(t)имеет гауссовское
распределение, а величинаесть результат линейной операции надn(t), то и величинараспределена также по гауссовскому
закону
Тогда, в соответствии с (7.3)
(7.4)
где
— табулированный интеграл вероятностей.
Можно доказать,что при флюктуационной
помехе на входе приемника со спектральной
плотностью помехи N0дисперсия
величиныопределяется
формулой2=N0Eэ /2.
Подставляя это значение 2в(7.4)получим окончательно(7.5)
Таким образом, в приемнике Котельникова
вероятность ошибки полностью определяется
эквивалентной энергией сигналов и
спектральной плотностью помехи и от
полосы пропускания приемника не зависит.
На практике обычно на входе приемника
все-таки ставят полосовой фильтр, так
как в канале связи, кроме флюктуационных
помех, часто встречаются также другие
помехи (от соседних каналов, импульсные
и др.)
Формула (7.5)является достаточно
общей. Для конкретных видов модуляции
в канале связи эту формулу видоизменяют,
для чего вычисляют соответствующее
значениеEэ. При этом для
различных видов модуляцииEэопределяют через энергию одного из
сигналов, а в окончательную формулу
вводят величину
h20
= E1/N0 . (7.6)
Следовательно, в приемнике Котельникова,
который также называется когерентным(в приемнике известна фаза принимаемого
сигнала)вероятность ошибки зависит
не от отношения мощности сигнала к
мощности помехи, а от отношения энергии
сигнала к спектральной плотности помехи.
Это позволяет, не меняя мощности сигнала,
увеличить его энергию за счет увеличения
его длительности, что дает дополнительные
возможности в построении помехоустойчивых
систем связи.
Соседние файлы в папке CHIN
- #
- #
- #
- #
Содержание
- 1 Ортогональность сигналов
- 2 Оптимальный некогерентный приемник АМн сигналов
- 3 Некогерентный приемник 2-ЧМн
- 4 Вероятность битовой ошибки
В прошлой статье рассматривали когерентные оптимальные приемники, т.е. приемники, которые знают начальную фазу принимаемого сигнала. Приёмник восстанавливает фазу, там стоит система синхронизации несущей. Если не усложнять структуру приёмника, т.е. не добавлять систему фазовой синхронизации.

Если рассматривать приемники, как демодулятор, это очень просто. Поэтому к приемнику примешиваются различные системы синхронизации с несущей, которые восстанавливают частоту и фазу принимаемого сигнала; тактовая синхронизация, которая должна подбирать время выборки сигнала; амплитудная регулировка, которая должна принимаемый сигнал выравнивать по амплитуде.
Для некоторых видов модуляции, например для амплитудной, частотной не обязательно знать начальную фазу сигнала, т.к. информация заключена в других параметрах, в амплитуде и частоте. Потому что там заложена информация либо в частоте либо в амплитуде, а не в начальной фазе сигнала. Соответственно можно сделать приемник таким образом, чтобы там не было системы синхронизации с несущей и при этом, чтобы приемник не был чувствителен к начальной фазе сигнала, т.е. чтобы он был некогерентным.
Если начальная фаза принимаемого сигнала и фаза опорного сигнала приемника не будут синхронизированы?

На рисунке выше представлен пример для 2-ФМн сигнала: слева – фазовая синхронизация корректная; справа – некорректная. Из-за возникшего сдвига фаз звездная диаграмма повернулась на некоторый угол φо. Если такой сигнал подать на когерентный приемник, то в тот момент времени, когда необходимо брать выборку сигнала, импульс будет иметь меньшую амплитуду, чем в том случае, когда фазы совпадают. Более того, если сдвиг фаз составит φо=90 градусов, то амплитуда импульса (выборки) вовсе будет равна нулю! В этом случае на устройство принятия решения будут поступать только шумы. Если с фазой не угадали, амплитуда выборки просела, а мощность шума осталась постоянной — это говорит о том, что ухудшили отношение сигнал/шум.
Ортогональность сигналов
Ортогональными сигналами называют сигналы у которых коэффициент корреляции равен нулю.
Корреляция это произведение двух сигналов и интеграл от этого произведения. Корреляция это некая степень похожести, чем больше коэффициент корреляции, тем два сигнала больше похожи друг на друга. Если коэффициент корреляции равен единице, то сигналы совпадают, а если нулю, то эти сигналы максимально не похожи друг на друга.
Сигналы s1(t) и s2(t) длительностью Тs называются ортогональными, если их коэффициент корреляции равен нулю:
Если на коррелятор или фильтр, согласованный с сигналом s1(t), подать ортогональный сигнал s2(t) , то на выходе коррелятора или СФ при t=Ts будет ноль. Это означает, что в этом случае будут приниматься только шумы.

Например, на картинке выше, подали ортогональный сигнал на согласованный фильтр (СФ), получили отклик на выходе фильтра, но в тот момент, когда надо брать выборку (это единица, потому что единица это длительность передаваемого сигнала) и получим ноль, как-будто сигнала и нет вовсе, будем принимать одни шумы.
Оптимальный некогерентный приемник АМн сигналов
Сейчас преобразуем оптимальные приемники, сделаем их некогерентными. Ниже на рисунке представлен оптимальный некогерентный приемник для двоичной амплитудной манипуляции. Когда рассматривали когерентный приемник достаточно было одного коррелятора или одного СФ. Здесь уже нужно брать 2 коррелятора. s1(t) = ks2(t).

На один коррелятор подается синус sin(ωt) на второй косинус cos(ωt), т.е. они сдвинуты на 90 градусов. Видим, что эти два коррелятора образуют квадратурный демодулятор, следовательно, на выходе получаем две квадратурные составляющие I и Q.
A=√I^2+Q^2
Если теперь внимательно посмотреть на правую часть приемника, можно увидеть, что в структуре реализовано данное выражение: A=√I^2+Q^2, вычисление амплитуды по квадратурам. В данном приемнике вне зависимости от начальной фазы принимаемого сигнала будет корректно определена амплитуда сигнала.
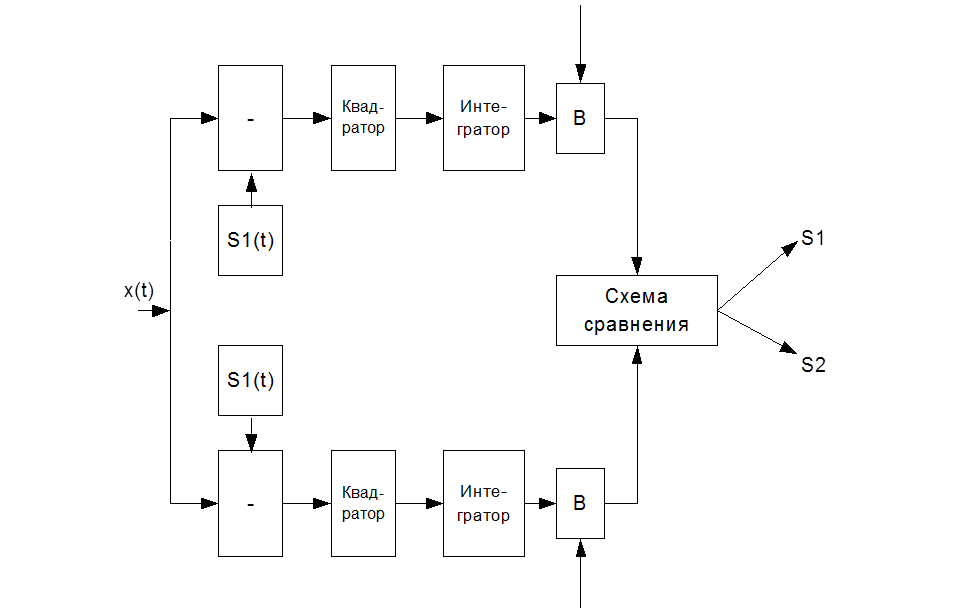
Некогерентный приемник 2-ЧМн
На рисунке ниже представлена структура оптимального некогерентного приемника сигналов с двоичной частотной манипуляцией. В данном случае количество корреляторов составляет 4, при том, что количество сигналов в ансамбле два. Для каждого сигнала по два коррелятора. Верхние два корреляторы работают на одну частоту, выделяют из шумов сигнал с частотой ω1, нижние два коррелятора выделяют сигнал с частотой ω2.

Данный приемник можно рассматривать, как совокупность двух приемников для АМн сигнала, рассмотренного выше. Каждый приемник настроен на частоту одного из тонов частотной манипуляции. Первый работает на частоте ω1, второй на частоте ω2. Устройство принятия решения сравнивает два значения А1 и А2 и если А1>А2, то считается, что передавался сигнал с частотой ω1, иначе с частотой ω2.
Данный приемник оценивает, на какой частоте сосредоточено больше энергии. Если мы рассматриваем данную структуру оптимального приемника, как два приемника АМн сигналов, настроенных на разные частоты, то возникает вопрос, куда исчезла операция извлечения корня? (см. картинку выше “оптимальный некогерентный приемник АМн сигналов” там на схеме есть корень). На данной структуре операцию извлечения корня можно оставить, но в этом нет необходимости. Если выполняется условие А1>А2, то очевидно что будет выполняться условие √А1>√А2 . Следовательно, операция извлечения корня не влияет на результат принятия решения и является избыточной, поэтому в целях экономии вычислительных ресурсов, данную операцию исключают.
Вероятность битовой ошибки
Рассмотрим, от чего зависит вероятность битовой ошибки, если принимать сигналы с разными видами модуляции оптимальными приёмниками. Аналитическое выражение для получения вероятности битовой ошибки для двоичных равновероятных сигналов, сюда можем отнести АМн,ЧМн и ФМн:
Из выражения, представленного выше, видно, что вероятность битовой ошибки Pb определяется тремя параметрами: Eb, Rb и No.
- Rb – нормированный коэффициент взаимной корреляции;
- Eb – энергия двоичного символа (бита);
- No – спектральная плотность мощности белого шума;
- Q(x) – Q-функция. Q-функция это функция стандартного нормального распределения Гаусса при μ=0 и σ=1.
Чем больше энергия бита, тем меньше вероятность битовой ошибки. Под энергией бита подразумевается энергия сигнала, передающего один бит информации. В свою очередь Eb пропорциональна средней мощности сигнала и длительности бита.
Коэффициент взаимной корреляции Rb – это численный показатель схожести двух сигналов. Чем сигналы сильнее отличаются друг от друга, тем сложнее перепутать их друг с другом. Ошибка возникает из-за того, что путают один сигнал с другим из-за воздействия шумов.
- Если Rb=1, то сигналы являются идентичными;
- если Rb=0, то сигналы являются ортогональными;
- если Rb=-1, то сигналы являются противоположными.
Рассмотрим один из вариантов двоичной модуляции, при которой два сигнала из ансамбля являются ортогональными, т.е. Rb=0. В этом случае вероятность битовой ошибки будет определяться через выражение:
Такой модуляцией может являться 2-ЧМн. В общем случае, коэффициент взаимной корреляции зависит от разницы частот двух сигналов s1(t) и s2(t), но при некоторой разнице частот, 2-ЧМн становится ортогональной модуляцией.
Рассмотрим случай, когда R=-1. Этот случай соответствует модуляции 2-ФМн, для которой выполняется условие s1(t)=-s2(t). Вероятность битовой ошибки будет определяться через выражение:
Из данного выражения видно, что энергия сигнала удвоилась, по сравнению с ортогональной модуляцией. Из этого можно сделать вывод о том, что 2-ФМн является более помехоустойчивой (в 2 раза по энергетике), чем ортогональная 2-ЧМн.
Вернемся еще раз к двоичной частотной манипуляции 2-ЧМн. Ранее уже было сказано, что коэффициент взаимной корреляции зависит от разницы частот между сигналами s1(t) и s2(t). При когерентном приеме Rb определяется через выражение:

где f1 и f2 – частоты сигналов s1(t) и s2(t) соответственно.
Если по выражению Rb построить график, то можно увидеть, что коэффициент корреляции уменьшается с ростом разницы частоты.

Однако также можно наблюдать, что когда разница частот удовлетворяет условию: f2-f1=n/2T то коэффициент взаимной корреляции становится равен нулю.
Здесь n – любое натуральное число, T – длительность символа (сигнала из ансамбля). Из этого выражения можно сделать вывод о том, что коэффициент корреляции Rb зависит не только от разницы частот (f1 — f2), но и от длительности символа Т. Наименьшая разность частоты, при которой обеспечивается ортогональность сигналов (Rb = 0), составляет: f2-f1=1/2T.
Например, если символьная скорость будет равна 1200 бод (символов/с), то наименьшая разница частот, при которой Rb = 0, составит 600 Гц. Двоичная частотная манипуляция, при которой выполняется условие f2-f1=1/2T, называется модуляцией (манипуляцией) с минимальным сдвигом ММС (англ. MSK).
На рисунке ниже представлен график зависимости вероятности битовой ошибки Pb при когерентном приеме ортогональной 2ЧМн (синий график) и 2ФМн (красный график).

Если посмотреть на значения графиков для вероятности битовой ошибки Pb=10^-8, то увидим, что требуемое отношение сигнал/шум Eb/No составит 15 дБ для 2-ЧМн и 12 дБ для 2-ФМн, т.е. разница составляет 3 дБ, что составляет 2 раза по мощности. Это объясняется тем, что сигналы 2-ФМн являются менее похожими (Rb = -1) чем сигналы 2-ЧМн (Rb = 0).
Оптимальный приемник обеспечивает максимальную
помехоустойчивость при данном способе передачи и данном виде помех.Оптимальный
приемник-это приемник, наилучшим образом с точки зрения заданного критерия
качества использующий известные параметры сигнала для определения (измерения)
неизвестного параметра сигнала.
Оптимальный приемник в отличие от
неоптимального — это когерентный приемник, в котором применяется интегратор (в
приемнике Котельникова) или оптимальный фильтр.
Критерии качества помехоустойчивости
приемников
S1(t), S2(t)-передаваемые сигналы.
y(t)=Si(t)+п(t)-сигналы на входе
приемника; п(t)-помеха.
а) Критерий минимального среднего риска:
Оптимальной считается решающая схема,
обеспечивающая наименьшее значение среднего риска
Rср=П12·Р(S1)·Р(y2/S1)+П21·Р(S2)·Р(y1/S2). Приемник должен принимать решение
таким образом, чтобы получить минимум Rср при заданных весовых коэффициентах
П12 и П21.
б) Критерий идеального наблюдателя
(критерий Котельникова)
Данный критерий минимизирует среднюю
вероятность ошибки. При
П12=П21
Рош=Р(S1)·Р(y2/S1)+Р(S2)·Р(y1/S2)
в) Критерий Неймана-Пирсона
Решающая схема считается оптимальной,
если при заданной вероятности ложной тревоги обеспечивается минимальная вероятность
пропуска сигнала
Задается вероятность пропуска сигнала
S1, т.е. P(y2/S1)=a. Tогда минимизируется условная вероятность P(y1/S2) при
обеспечении заданного значения а.
г) Критерий максимального правдоподобия.
Этот критерий минимизирует потери информации lп=Р(y1/S2)+Р(y2/S1). Получается
из критерия минимального среднего риска при условии
П12=1/P(S1), П21=1/P(S2).
Применяется, когда необходимо уменьшить
вероятность искажения того сигнала, вероятность передачи которого меньше, а
также при неизвестных априорных вероятностях P(S1) и P(S2).
Оптимальный
приемник полностью известных сигналов
Алгоритм работы
оптимального приемника
Оптимальный приемник – это такой
приемник, который обеспечивает максимальную помехоустойчивость при данном
способе передачи (данном виде сигнала) и данном виде помех. Оптимальный
приемник полностью известных сигналов использует все параметры сигнала, не
несущие информацию. Пусть S1(t)=Acos w1t, S2(t)=Acos w2t, 0<=t<=T. Оптимальный
приемник (идеальный приемник Котельникова) работает следующим образом:
1. Находится ![]() и
и
если λ(x)>λo, то принимается решение в пользу сигнала S1, иначе S2.
Для упрощения решения полагаем, что P(S1)=P(S2)=0,5.
Тогда λо=1. В этом случае критерий максимального правдоподобия и критерий идеального
наблюдателя совпадают.
2. Предполагаем, что на вход приемника
поступает сигнал x(t)=S1(t)+п(t). Берется k отсчетов сигнала через
одинаковые интервалы Δt, равные интервалу корреляции помехи τoп и
рассматриваются отсчетные значения суммы сигнала S1(t) и помехи п(t)
в различных сечениях ti. Получаем, что оптимальное правило решения
имеет вид:
 то S1.
то S1.
В интегральной форме это выражение:
 то S1.)
то S1.)
В компактной форме:
если ![]() то S1.
то S1.
Если вероятности передачи сигналов S1(t) и S2(t) не одинаковы, то неравенство
принимает вид:
![]() то S1.
то S1.
Полученному правилу соответствует
структурная схема приемника:
-2σП2LnP(S1)
-2σП2LnP(S2)
Рис.5. Структурная схема оптимального
приемника
Сложность реализации в том, что
генераторы S1(t) и S2(t) должны выдавать сигналы, идентичные
по форме сигналам, ожидаемым на входе приемника, поэтому эти генераторы должны
синхронизироваться приходящими сигналами.
Оптимальный некогерентный ОФМ приемник
содержит вместо ФНЧ оптимальный фильтр.
Вероятность ошибки в оптимальном
приемнике
В
приемнике Котельникова вероятность ошибки зависит не от отношения мощности
сигнала к мощности помехи, а от отношения энергии сигнала к спектральной
плотности помехи. Для оптимального ОФМ приемника 

Рассчитаем — вероятность ошибки цифрового сигнала на выходе приёмника, учитывая особенности передачи сигнала по каналу связи.
Вероятность ошибочного приема при относительной фазовой модуляции и некогерентном способе приема для известного отношения сигнала / шум определяется согласно следующему выражению:

(3.1)
где — соотношение сигнал/шум находится как:

(3.2)
где — мощность сигнала на входе приёмника;
— спектральная плотность.

(3.3)
Используя (3.1), (3.2) и (3.3) рассчитываем:



Длина кодового слова:
(3.4)
где — число уровней квантования.
n=log2 256=8
Рассчитаем длительность кодового слова для заданной системы связи:
Длительность между посылками кодовых слов ?t=125 мкс, длительности кодового слова = . Свободное же между посылками время . Это свободное время может быть использовано для применения помехоустойчивого кодирования, или для создания многоканальной системы связи, или же для улучшения соотношения сигнал/шум.

Полученная вероятность ошибки велика по сравнению с вероятностью ошибки в соответствии с ГОСТ’ом (). Чтобы уменьшить вероятности ошибки хотя бы на 2-3 порядка можно сузить полосу пропускания системы путём увеличения длительности элементарной посылки, поставить оптимальный фильтр, увеличить длительность кодового слова или же перейти к другому виду модуляции. В данном случае это не целесообразно, так как ОФМ является наилучшим видом модуляции.
Сравнение выбранной схемы с оптимальным приемником

Для уменьшения вероятности ошибки мы поставим в схему приемника оптимальный фильтр (Рис. 4.1). Оптимальный фильтр улучшает соотношения сигнал/шум, но при этом возникает межсимвольная интерференция, которую можно устранить путем установки в схему ключа, который будет разряжать интегрирующую цепочку после поступления каждого импульса. Схема приемника сигнала усложняется, что может сказаться на надежности, однако выигрыш в соотношении сигнал/шум существенен.
Теперь соотношение сигнал/шум находится как:

(4.1)
При помощи (4.1) и (3.1) найдем вероятность ошибки и соотношение сигнал/шум:

При установки в схему согласованного фильтра мы добились того, что наша вероятность ошибки стала оптимальной за счет уменьшения полосы пропускания. Оставшееся свободное время можно использовать для организации служебного канала, Интернета или помехоустойчивого кодирования.
Все дальнейшие расчёты будем производить с данными для оптимального приёмника, полученными в этом пункте:
мкс;
Передача аналоговых сигналов методом ИКМ
Прямое аналого-цифровое преобразование является высококачественным методом кодирования. Еще в 60-х годах был принят алгоритм оцифровки голоса под названием импульсно-кодовой модуляции (ИКМ). Оцифровка голосового сигнала включает измерение уровня аналогового сигнала через равные промежутки времени. В соответствии со стандартом принимается, что для узнаваемости голоса необходимо обеспечить передачу его частотных составляющих в диапазоне от 300 до 3400 Гц.
Для преобразования непрерывных сообщений в дискретную форму (сигналы импульсно-кодовой модуляции) используются операции дискретизации и квантования. Полученная таким образом последовательность квантовых отсчётов кодируется и передаётся по дискретному каналу, как всякое дискретное сообщение. На приёмной стороне после декодирования восстанавливается (с той или иной точностью) непрерывное сообщение.
Для передачи непрерывных сообщений методом ИКМ можно воспользоваться дискретным каналом. Для этого необходимо преобразовать непрерывное сообщение в дискретный сигнал, то есть в последовательность символов, сохранив содержащуюся в сообщении существенную часть информации. Типичными примерами цифровых систем передачи непрерывных сообщений являются системы с кодово-импульсной модуляцией и дельта-модуляцией (ДМ).

Кодово-импульсная модуляция складывается из трех операций: дискретизация по времени в соответствии с теоремой Котельникова , квантование отсчетов и кодирование квантованных отсчетов блочным равновесным двоичным кодом. При этом каждый отсчет кодируется в одну комбинацию представлением отображающей его m-ичной цифры в двоичной (m=2) системе счисления. Для полного использования кода, число квантованных значений m=N, обычно выбирают m=2n. Для речевых сообщений чаще всего m=32, 64, 128 и 256, что соответствует n= 5, 6, 7 и 8.
Цифровые методы передачи обладает рядом преимуществ перед аналоговыми. Из основных можно указать следующие:
малое влияние аппаратурных погрешностей на точность передачи сообщения;
высокая помехоустойчивость;
возможность регенерации сигналов (восстановление их формы) при ретрансляции;
высокие технико-экономические показатели — широкое использование элементов цифровой техники, низкие требования к линейности общего тракта и т.д.
При цифровой системе передачи непрерывных сообщений можно повысить верность применением помехоустойчивого кодирования. Высокая помехоустойчивость цифровых систем позволяет осуществить практически неограниченную по дальности связи при использовании каналов сравнительно на высокого качества.
Другим существенным преимуществом цифровых систем передачи информации является широкое использование в аппаратуре преобразования сигналов современной элементарной базы цифровой вычислительной техники и микроэлектроники. Более того, на цифровой основе могут быть объединены в единой системе сигналы передачи данных с сигналами передачи речи и телевидения.
Рассмотрим структурную схему цифрового канала связи. В отличие от аналогового канала передачи, в составе цифрового канала предусмотрены устройства для преобразования непрерывного сообщения в цифровую форму — АЦП на передающей стороне и устройства преобразования цифрового сигнала в непрерывный — АЦП на приемной стороне.
Полученный с выхода АЦП сигнал ИКМ поступает или непосредственно в линию связи или на вход передатчика (модулятора), где последовательность двоичных импульсов преобразуется в радиоимпульсы.
На приемной стороне лини связи последовательность импульсов после демодуляции и регенерации в приемнике поступает на ЦАП, назначение которого состоит обратном преобразовании (восстановлении) непрерывного сообщения по принятой последовательности кодовых комбинаций. В состав ЦАП входят декодирующее устройство, предназначенное для преобразования кодовых комбинаций в квантованную последовательность отсчетов, и сглаживающий фильтр, восстанавливающий непрерывные сообщения по квантованным значениям.
Преобразование непрерывных сообщений в цифровую форму в системах ИКМ округлением мгновенных значений до ближайших разрешенных уровней квантования. Возникающая при этом погрешность представления является неустранимой, но контролируемой (так как не превышает половины уровня квантования). Выбрав достаточно малый шаг квантования, можно обеспечить эквивалентность по заданному Е-критерию исходного и квантованного сообщений. Погрешность (ошибку) квантования, представляют собой разность между исходным сообщением и сообщением восстановленным по квантованным отчетам, называют «шумом квантования».
Одной из причин, приводящих к отличию принятого сообщения от переданного в системе с ИКМ, является шум квантования, другой — помехи в канале, которые накладываются на передаваемые символы кодовых комбинаций и могут вызывать ошибки. Ошибки в символах (при отсутствии избыточности) приводят к ошибочному декодированию всей кодовой комбинации.
Длина кода определяется из следующего неравенства:
, при этом , так как .
В данной курсовой работе было заданно число уровне квантования N=256=28, то есть n=8.
Большое значение, для оценки качества принимаемого сигнала, имеет понятие шумы квантования. Этот шум не связан с помехами в канале и целиком определяется выбором числа уровней квантования. Его можно сделать сколь угодно малым, увеличивая число уровней. Воздействие шума квантования можно заметно уменьшить, применяя неравномерное квантование, при котором большие уровни сообщения квантуются с большим шагом, а низкие уровни — с меньшим шагом. Шум квантования при этом коррелирован с сообщением и имеет тем меньшую мгновенную мощность, чем меньше уровень сообщения. Это позволяет лучше различать слабые отрезки сообщения.
Отношение мощности сигнала к мощности шума квантования определяется выражением

(5.1)
где n — число разрядов кода, П — пик-фактор сигнала.
Мощность шума квантования находится по следующей формуле:

В2 (5.2)
Данный способ передачи имеет очень важные положительные качества. Самое главное данный способ обеспечивает не накопление ошибок при передаче сигнала через ретрансляторы. В сравнении с аналоговыми способами передачи требует значительно меньшую мощность при той же вероятности ошибки. Пригоден для передачи цифровых данных. Аппаратура системы связи строится на дискретных элементах, которые не требуют настройки.
К недостаткам можно отнести необходимость в широкополосном канале связи.
В данном случае шумами квантования, В2, можно пренебречь и число уровней квантования, N=256, будет достаточно.
В прошлой статье рассматривали когерентные оптимальные приемники, т.е. приемники, которые знают начальную фазу принимаемого сигнала. Приёмник восстанавливает фазу, там стоит система синхронизации несущей. Если не усложнять структуру приёмника, т.е. не добавлять систему фазовой синхронизации.
Если рассматривать приемники, как демодулятор, это очень просто. Поэтому к приемнику примешиваются различные системы синхронизации с несущей, которые восстанавливают частоту и фазу принимаемого сигнала; тактовая синхронизация, которая должна подбирать время выборки сигнала; амплитудная регулировка, которая должна принимаемый сигнал выравнивать по амплитуде.
Для некоторых видов модуляции, например для амплитудной, частотной не обязательно знать начальную фазу сигнала, т.к. информация заключена в других параметрах, в амплитуде и частоте. Потому что там заложена информация либо в частоте либо в амплитуде, а не в начальной фазе сигнала. Соответственно можно сделать приемник таким образом, чтобы там не было системы синхронизации с несущей и при этом, чтобы приемник не был чувствителен к начальной фазе сигнала, т.е. чтобы он был некогерентным.
Если начальная фаза принимаемого сигнала и фаза опорного сигнала приемника не будут синхронизированы?
На рисунке выше представлен пример для 2-ФМн сигнала: слева – фазовая синхронизация корректная; справа – некорректная. Из-за возникшего сдвига фаз звездная диаграмма повернулась на некоторый угол φо. Если такой сигнал подать на когерентный приемник, то в тот момент времени, когда необходимо брать выборку сигнала, импульс будет иметь меньшую амплитуду, чем в том случае, когда фазы совпадают. Более того, если сдвиг фаз составит φо=90 градусов, то амплитуда импульса (выборки) вовсе будет равна нулю! В этом случае на устройство принятия решения будут поступать только шумы. Если с фазой не угадали, амплитуда выборки просела, а мощность шума осталась постоянной — это говорит о том, что ухудшили отношение сигнал/шум.
Ортогональность сигналов
Ортогональными сигналами называют сигналы у которых коэффициент корреляции равен нулю.
Корреляция это произведение двух сигналов и интеграл от этого произведения. Корреляция это некая степень похожести, чем больше коэффициент корреляции, тем два сигнала больше похожи друг на друга. Если коэффициент корреляции равен единице, то сигналы совпадают, а если нулю, то эти сигналы максимально не похожи друг на друга.
Сигналы s1(t) и s2(t) длительностью Тs называются ортогональными, если их коэффициент корреляции равен нулю:
Если на коррелятор или фильтр, согласованный с сигналом s1(t), подать ортогональный сигнал s2(t) , то на выходе коррелятора или СФ при t=Ts будет ноль. Это означает, что в этом случае будут приниматься только шумы.
Например, на картинке выше, подали ортогональный сигнал на согласованный фильтр (СФ), получили отклик на выходе фильтра, но в тот момент, когда надо брать выборку (это единица, потому что единица это длительность передаваемого сигнала) и получим ноль, как-будто сигнала и нет вовсе, будем принимать одни шумы.
Оптимальный некогерентный приемник АМн сигналов
Сейчас преобразуем оптимальные приемники, сделаем их некогерентными. Ниже на рисунке представлен оптимальный некогерентный приемник для двоичной амплитудной манипуляции. Когда рассматривали когерентный приемник достаточно было одного коррелятора или одного СФ. Здесь уже нужно брать 2 коррелятора. s1(t) = ks2(t).
На один коррелятор подается синус sin(ωt) на второй косинус cos(ωt), т.е. они сдвинуты на 90 градусов. Видим, что эти два коррелятора образуют квадратурный демодулятор, следовательно, на выходе получаем две квадратурные составляющие I и Q.
A=√I^2+Q^2
Если теперь внимательно посмотреть на правую часть приемника, можно увидеть, что в структуре реализовано данное выражение: A=√I^2+Q^2, вычисление амплитуды по квадратурам. В данном приемнике вне зависимости от начальной фазы принимаемого сигнала будет корректно определена амплитуда сигнала.
Некогерентный приемник 2-ЧМн
На рисунке ниже представлена структура оптимального некогерентного приемника сигналов с двоичной частотной манипуляцией. В данном случае количество корреляторов составляет 4, при том, что количество сигналов в ансамбле два. Для каждого сигнала по два коррелятора. Верхние два корреляторы работают на одну частоту, выделяют из шумов сигнал с частотой ω1, нижние два коррелятора выделяют сигнал с частотой ω2.
Данный приемник можно рассматривать, как совокупность двух приемников для АМн сигнала, рассмотренного выше. Каждый приемник настроен на частоту одного из тонов частотной манипуляции. Первый работает на частоте ω1, второй на частоте ω2. Устройство принятия решения сравнивает два значения А1 и А2 и если А1>А2, то считается, что передавался сигнал с частотой ω1, иначе с частотой ω2.
Данный приемник оценивает, на какой частоте сосредоточено больше энергии. Если мы рассматриваем данную структуру оптимального приемника, как два приемника АМн сигналов, настроенных на разные частоты, то возникает вопрос, куда исчезла операция извлечения корня? (см. картинку выше “оптимальный некогерентный приемник АМн сигналов” там на схеме есть корень). На данной структуре операцию извлечения корня можно оставить, но в этом нет необходимости. Если выполняется условие А1>А2, то очевидно что будет выполняться условие √А1>√А2 . Следовательно, операция извлечения корня не влияет на результат принятия решения и является избыточной, поэтому в целях экономии вычислительных ресурсов, данную операцию исключают.
Вероятность битовой ошибки
Рассмотрим, от чего зависит вероятность битовой ошибки, если принимать сигналы с разными видами модуляции оптимальными приёмниками. Аналитическое выражение для получения вероятности битовой ошибки для двоичных равновероятных сигналов, сюда можем отнести АМн,ЧМн и ФМн:
Из выражения, представленного выше, видно, что вероятность битовой ошибки Pb определяется тремя параметрами: Eb, Rb и No.
- Rb – нормированный коэффициент взаимной корреляции;
- Eb – энергия двоичного символа (бита);
- No – спектральная плотность мощности белого шума;
- Q(x) – Q-функция. Q-функция это функция стандартного нормального распределения Гаусса при μ=0 и σ=1.
Чем больше энергия бита, тем меньше вероятность битовой ошибки. Под энергией бита подразумевается энергия сигнала, передающего один бит информации. В свою очередь Eb пропорциональна средней мощности сигнала и длительности бита.
Коэффициент взаимной корреляции Rb – это численный показатель схожести двух сигналов. Чем сигналы сильнее отличаются друг от друга, тем сложнее перепутать их друг с другом. Ошибка возникает из-за того, что путают один сигнал с другим из-за воздействия шумов.
- Если Rb=1, то сигналы являются идентичными;
- если Rb=0, то сигналы являются ортогональными;
- если Rb=-1, то сигналы являются противоположными.
Рассмотрим один из вариантов двоичной модуляции, при которой два сигнала из ансамбля являются ортогональными, т.е. Rb=0. В этом случае вероятность битовой ошибки будет определяться через выражение:
Такой модуляцией может являться 2-ЧМн. В общем случае, коэффициент взаимной корреляции зависит от разницы частот двух сигналов s1(t) и s2(t), но при некоторой разнице частот, 2-ЧМн становится ортогональной модуляцией.
Рассмотрим случай, когда R=-1. Этот случай соответствует модуляции 2-ФМн, для которой выполняется условие s1(t)=-s2(t). Вероятность битовой ошибки будет определяться через выражение:
Из данного выражения видно, что энергия сигнала удвоилась, по сравнению с ортогональной модуляцией. Из этого можно сделать вывод о том, что 2-ФМн является более помехоустойчивой (в 2 раза по энергетике), чем ортогональная 2-ЧМн.
Вернемся еще раз к двоичной частотной манипуляции 2-ЧМн. Ранее уже было сказано, что коэффициент взаимной корреляции зависит от разницы частот между сигналами s1(t) и s2(t). При когерентном приеме Rb определяется через выражение:
где f1 и f2 – частоты сигналов s1(t) и s2(t) соответственно.
Если по выражению Rb построить график, то можно увидеть, что коэффициент корреляции уменьшается с ростом разницы частоты.
Однако также можно наблюдать, что когда разница частот удовлетворяет условию: f2-f1=n/2T то коэффициент взаимной корреляции становится равен нулю.
Здесь n – любое натуральное число, T – длительность символа (сигнала из ансамбля). Из этого выражения можно сделать вывод о том, что коэффициент корреляции Rb зависит не только от разницы частот (f1 — f2), но и от длительности символа Т. Наименьшая разность частоты, при которой обеспечивается ортогональность сигналов (Rb = 0), составляет: f2-f1=1/2T.
Например, если символьная скорость будет равна 1200 бод (символов/с), то наименьшая разница частот, при которой Rb = 0, составит 600 Гц. Двоичная частотная манипуляция, при которой выполняется условие f2-f1=1/2T, называется модуляцией (манипуляцией) с минимальным сдвигом ММС (англ. MSK).
На рисунке ниже представлен график зависимости вероятности битовой ошибки Pb при когерентном приеме ортогональной 2ЧМн (синий график) и 2ФМн (красный график).
Если посмотреть на значения графиков для вероятности битовой ошибки Pb=10^-8, то увидим, что требуемое отношение сигнал/шум Eb/No составит 15 дБ для 2-ЧМн и 12 дБ для 2-ФМн, т.е. разница составляет 3 дБ, что составляет 2 раза по мощности. Это объясняется тем, что сигналы 2-ФМн являются менее похожими (Rb = -1) чем сигналы 2-ЧМн (Rb = 0).