Отчёт о лабораторной работе
Описание лабораторной установки
Структурная схема лабораторной установки показана на рисунке 1.
Для сравнения, свойства статической и астатической систем исследуются одновременно, при одном входном воздействии x(t). Математическая модель задается передаточной функцией, соответственно, К1(р), К2(р) для статической системы; К3(р), К4(р) для астатической системы.
Рисунок 1 – Структурная схема лабораторной установки
Теоретическая часть
Статическая система
Передаточная функция разомкнутой системы:
Характеристическое уравнение разомкнутой системы:
Передаточная функция замкнутой системы:
Характеристическое уравнение замкнутой системы:
Коэффициент передачи по ошибке регулирования:
Коэффициенты ошибок:
Ошибка регулирования при :
Ошибка регулирования при :
Астатическая система
Передаточная функция разомкнутой системы:
Характеристическое уравнение разомкнутой системы:
Передаточная функция замкнутой системы:
Характеристическое уравнение замкнутой системы:
Коэффициент передачи по ошибке регулирования:
Коэффициенты ошибок:
Ошибка регулирования при :
Ошибка регулирования при :
Диаграммы ошибки регулирования для заданных воздействия приведены наи рисунках 2 и 3.
Рисунок 2 – Ошибка регулирования при воздействии x(t)=1
Рисунок 3 – Ошибка регулирования при воздействии x(t)=0,2t
Расчёт показывает, что ошибка астатической системы меньше, чем статической системы.
Экспериментальное исследование ошибки регулирования
Модель для исследования ошибки регулирования в программе MicroCap показана на рисунке 4.
Диаграммы отклика системы и ошибки регулирования для заданных видов воздействий приведены на рисунках 5 и 6.
Рисунок 4 – Модель для исследования ошибки регулирования
Рисунок 5 – Временные диаграммы отклика и ошибки при воздействии x(t)=1
Параметры переходного процесса:
- перерегулирование – 21,6%;
- длительность переходного процесса – 60 мс;
- декремент затухания колебаний – 0,096.
Рисунок 6 – Временные диаграмма отклика и ошибки при воздействии x(t)=0,2t
Выводы
При выполнении работы было проведено исследование ошибки регулирования в статической и астатической САУ при постоянном и пропорциональном воздействиях. Были выполнен расчёт выражения для ошибки регулирования как функции времени и экспериментальная проверка полученных результатов.
По результатам работы можно сделать следующие выводы:
- Величина ошибки регулирования определяется видом передаточной функции САУ.
- Антистатическая система обеспечивает меньшую ошибку регулирования по сравнению со статической системой.
Контрольные вопросы
- Дать определение понятиям: ошибка регулирования, коэффициент передачи по ошибке.
Ошибка регулирования – разность между требуемым значением регулируемой величины и текущим её значением.
Коэффициент передачи по ошибке регулирования – зависимость ошибки регулирования от воздействия, вызвавшего эту ошибку.
- Перечислить методы определения ошибки регулирования и дать им краткую характеристику.
Метод коэффициентов ошибки используется при полиномиальном входном воздействии.
Итерационный метод используется при сложном входном воздействии.
- Чем отличаются статические системы автоматического регулирования от астатических?
- Какой порядок астатизма необходимо ввести в следящую автоматическую систему, чтобы обеспечить значение установившейся ошибки x(t)=0, если задающее воздействие описывается ограниченно дифференцируемой функцией?
Порядок астатизма должен быть не менее числа ненулевых производных функции, задающей входное воздействие.
- Покажите качественную связь между переходной характеристикой, годографом и ЛАЧХ автоматической системы минимально-фазового типа. Можно ли по виду ЛАЧХ разомкнутой системы судить об устойчивости замкнутой системы?
Значение фазы при любой частоте пропорционально средневзвешенному значению производной от логарифмической амплитудно-частотной характеристики.
По ЛАЧХ разомкнутой системы можно определить запасы устойчивости: запас по фазе m отсчитывается по ЛФХ на частоте среза, а запас по амплитуде соответствует значению ЛАХ на критической частоте, взятому с обратным знаком
Основы управления техническими системами. Вариант 7
Тип работы: Работа Лабораторная
Форматы файлов: Microsoft Word
Сдано в учебном заведении: ДО СИБГУТИ
Описание:
Лабораторная работа №1
Изучение типовых динамических звеньев
1. Цель работы
Ознакомление с методами исследования линейных стационарных систем автоматического регулирования (САР), способами представления моделей типовых динамических звеньев, структурных преобразований систем, а также методами исследования влияния параметров звеньев на частотные и переходные ха-рактеристики.
2. Описание лабораторной установки
3. Подготовка к работе
4. Порядок выполнения работы
4.1. Запустить программу Micro Cap, открыть файл lab_RA_1 (или создать файл в соответствие с рис. 1.4), после чего на экране должна появиться схема лабораторной установки, показанная на рисунке 1.4.
4.2. Исследовать характеристики типовых звеньев, указанных в таблице 1.2. В таблице указано по три типовых звена для каждого варианта (выбираются по последней цифре пароля). Это не система звеньев. Каждое из указанных звеньев исследуется отдельно!
Таблица 1.2 – Параметры типовых линейных звеньев для анализа
№ бригады: 7
Наименование типового звена:
— Инерционное: К=5; Т1=0,01
— Форсирующее: К=20; Т1=0,001
— Колебательное: К=40; Т1=0,001; E=0,2
Таким образом, для каждого звена, указанного в таблице 2.1 (по отдельности!), ввести передаточную функцию для элемента К(s).
Указание: передаточная функция звена постоянного запаздывания записывает-ся через экспоненту, например: exp(-s*0.1). При построении логарифмических частотных характеристик этого звена верхняя частота не должна превышать не-скольких Гц. Программа не очень любит возводить экспоненту в большие степени.
Далее необходимо выполнить временной и частотный анализ:
— расчет переходной характеристики. Осциллограммы входного и выходного напряжений привести в отчете.
— расчет логарифмических амплитудно-частотной (ЛАЧХ) и фазо-частотной (ЛФЧХ) характеристик.
— расчет амплитудно-фазовой частотной характеристики (АФЧХ или годографа).
Все полученные частотные характеристики привести в отчете.
4.3. Исследовать частотные характеристики (ЛАЧХ, ЛФЧХ, АФЧХ) системы из последовательного соединения типовых звеньев, указанных в таблице 1 контрольной работы (в соответствии с последней цифрой пароля). Результаты частотного анализа привести в отчете, сравнить с результатами выполнения задания 1 контрольной работы.
5. Содержание отчета
5.1. Цель работы.
5.2. Таблицы вариантов параметров.
5.3. Передаточные функции исследуемых звеньев, а также системы звеньев, причем для каждого звена (или системы) записать дифференциальное уравнение и привести пример схемной реализации (преимущественно на базе идеального операционного усилителя).
5.4. Результаты временного и частотного анализа в виде осциллограмм и частотных характеристик.
СКАЧАТЬ
1. Определим передаточную
функцию ошибки на воздействие

.
2. Определим передаточную
функцию ошибки для воздействия

.
3. Определим дисперсию ошибки,
вызванную воздействием

.
4. Определим дисперсию ошибки,
вызванную воздействием

.
5. Найдём результирующую дисперсию
ошибки
![]()
.
Пример №1. Определить дисперсию
ошибки для случайного воздействия с
энергетическим спектром
![]()
и передаточной функцией
![]()
.
1. Найдём передаточную функцию
по ошибке

.
2. Найдём дисперсию ошибки,
вызванную воздействием

,
тогда

где
![]()
— коэффициенты при полиномах.
Пример №2. Определить дисперсию
ошибки для

для случайного воздействия с энергетическим
спектром
(белый шум)
1. Найдём передаточную функцию по ошибке

,
![]()
.
2. Найдём дисперсию ошибки,
вызванную воздействием

,
![]()

где
![]()
.
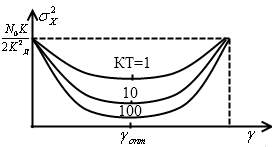
Оптимальное значение
![]()
можно найти из условия

,
тогда

.
Если
![]()
,
то

.
6.2 Оптимизация параметров линейных систем радиоавтоматики
Методы оптимизации зависят от следующих
факторов:
1. структуры системы;
2. характера воздействия
(детерминированные, случайные);
3. критерия оптимизации;
4. дополнительных ограничения.
От характера воздействия рассмотрим
следующие случаи:
1.
и
![]()
— детерминированные процессы;
2.
— детерминированный процесс, а
— случайный процесс;
3.
и
— случайные процессы;
4.
— приложенный к различным точкам системы.
6.2.1 Оптимизация параметров линейных систем в случае детерминированных процессов
В качестве критерия оптимизации выберем
минимум суммарной ошибки
![]()
.
1. Определим ошибку, обусловленную
детерминированным полезным воздействием

2. Определим ошибку, вызванную
детерминированным мешающим воздействием

3. Найдём результирующую ошибку
![]()
.
4. Найдём оптимальное значение параметров
из условия

,
решая систему этих уравнений, найдём
![]()
.
6.2.2 Оптимизация параметров линейных систем при детерминированном полезном и случайном мешающем воздействиях
В качестве критерия оптимизации
выберем минимум среднего квадрата
ошибки
![]()
.
1. Определить ошибку, вызванную
2. Определить дисперсию ошибки,
вызванную мешающим воздействием

,
где

3. Найдём средний квадрат ошибки
![]()
.
4. Найдём оптимальное значение параметров
из условия
,
решая систему этих уравнений, найдём
![]()
.
Пример №1. Определить
оптимальное значение параметров системы
с передаточной функцией

в случае детерминированного полезного
воздействия
![]()
и помехи
с энергетическим спектром
1. Найдём ошибку
![]()
1.1

1.2 Определим коэффициенты
ошибок

1.3 Определим ошибку

2. Найдём дисперсию ошибки
2.1 Определим
![]()

2.2 Определим дисперсию ошибки

![]()
,

3. Определим средний квадрат
ошибки

.
Из выражения видно, что
увеличивая
![]()
уменьшается
![]()
.
С увеличением
![]()
![]()
в начале уменьшается, а затем увеличивается.
Из этого следует, что существует
оптимальное значение параметров
![]()
и
.
4. Найдём оптимальное значение
и
из условия:


Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Федеральное агентство связи
Федеральное государственное бюджетное образовательное
учреждение высшего образования
Сибирский Государственный Университет Телекоммуникаций и Информатики
По дисциплине: ОУТС
Выполнил: студент
2-го курса Ф МТС гр.МПП-78
Черепанова Дарья
Проверил: Архипов С.Н.
.
Новосибирск, 2019г
Задание по 1-й лабораторно работе
«Изучение типовых динамических звеньев»
Данные второго варианта
| Звено | Интегрирующее | Форсирующее | Инерционное |
| T | 0,1 | 0,1 | 0,001 |
| k | 10 | 1 | 10 |
Уравнение звеньев
Модуль вектора
Расчетное задание:
Построить: ЛАЧХ, ЛФЧХ и Годограф .
L(w)
20дб
40дб
0,1
0,01
lg(w)
(w)
0,1
0,01
lg(w)
100
-100
Im
Re
Задание по 2-й лабораторной работе
«Изучение устойчивости линейных систем автоматического регулирования»
Для автоматической замкнутой следящей системы, состоящей из трех последовательно соединённых инерционных звеньев, определить с помощью метода Гурвица критический коэффициент передачи ккр, соответствующий границе устойчивости при одинаковых постоянных времени звеньев
Запищим передаточную функцию:
Составим характеристическое уравнение для замкнутой системы
Где
Из условия получим:
Для анализа устойчивости составим определитель 3х3 из коэффициента характеристического уравнения:
1)
2)
3)
-граница устойчивости системы
Задание по 3-й лабораторной работе
«Исследование ошибок регулирования при детерминированных воздействиях»
|
Статистическая система |
Астатическая система |
||
|
K1(S) |
K2(S) |
K3(S) |
K4(S) |
|
2/(1+0.02*S) |
1/(1+0.02*S) |
2/(1+0.02*S) |
1/(0.02*S) |
Задание:
- Записать передаточную функцию разомкнутой системы.
- Записать характеристическое уравнение замкнутой системы и передаточную функцию ошибки регулирования.
- Определить коэффициенты ошибки и вывести формулу оригинала ошибки регулирования для двух вариантов входного воздействия:x(t)=1 и x(t)=0.2t.
- Построить временную зависимость установившейся ошибки.
Статистическая система:
1.ПФРС
2.ПФЗС
ПФОР
Формула оригинала
При x(t)=1
При x(t)=0.2t
Астатическая система:
2.ПФЗС
ПФОР
Формула оригинала
При x(t)=1
При x(t)=0.2t
Поделитесь с Вашими друзьями:
Анализ систем с переменными параметрами при детерминированных воздействиях сводится к решению дифференциальных уравнений вида (1.1) с переменными коэффициентами.
Классические методы решения изложены в соответствующих курсах (см., например, [2], [12]). Однако общих аналитических методов решения, как известно, не существует и достаточно хорошо изученным является сравнительно небольшое число частных случаев уравнения (1.1) и при том в большинстве своем не выше второго порядка (например, уравнения Матье, Бесселя и др.). Кроме того, необходимо подчеркнуть, что решение
дифференциальных уравнений с переменными коэффициентами, как правило, не выражается в элементарных функциях. Поэтому даже в тех редких случаях, когда можно найти точное решение, его трудно использовать при практических расчетах.
Вследствие указанных прлчин на практике при анализе нестационарных систем обычно пользуются различными либо приближенными аналитическими, либо экспериментальными методами, основанными на применении электронных моделирующих устройств. Один из приближенных методов анализа нестационарных систем, сводящий решение уравнения (1.1) с переменными коэффициентами к решению дифференциальных уравнений с постоянными коэффициентами, излагается ниже (см. также, например, [10]).
Этот метод состоит из трех этапов: первый — определение функции Грина  представляющей собой решение уравнения (1.12а) при начальных условиях (1.19);
представляющей собой решение уравнения (1.12а) при начальных условиях (1.19);
второй — вычисление импульсной переходной функции  соответствующей уравнению (1.5) по найденной функции
соответствующей уравнению (1.5) по найденной функции 
третий — вычисление величины на выходе  при детерминированном воздействии
при детерминированном воздействии  на входе при помощи интеграла свертки (1.7).
на входе при помощи интеграла свертки (1.7).
Первый этап решения заключается в следующем. Выбирая в качестве приближенных значений коэффициентов уравнения (1.16) их величины при  т. е. в момент приложения воздействия
т. е. в момент приложения воздействия  перепишем уравнение (1.16) в виде
перепишем уравнение (1.16) в виде

где  имеет постоянные относительно
имеет постоянные относительно  коэффициенты, равные
коэффициенты, равные 
Применяя метод последовательных приближений, представляем решение в виде ряда

где  определяются как решения линейных дифференциальных уравнений с постоянными коэффициентами для каждого заданного значения
определяются как решения линейных дифференциальных уравнений с постоянными коэффициентами для каждого заданного значения 

В случае, когда параметры системы мало меняются на интервале времени  вне которого
вне которого  мало по сравнению с ее максимальной величиной, этот метод дает достаточное приближение к точному решению уже при
мало по сравнению с ее максимальной величиной, этот метод дает достаточное приближение к точному решению уже при 
Перейдем теперь ко второму этапу. Рассматривая в уравнении (1.5) правую часть как воздействие  на основании уравнения (1.10) можем написать
на основании уравнения (1.10) можем написать

Но

Поэтому

или сокращенно

где  оператор,
оператор, 

называется оператором, сопряженным оператору  [см. формулу (1.4)].
[см. формулу (1.4)].
Пользуясь формулой (1.73), можно по импульсной переходной функции  уравнения (1.16) найти функцию
уравнения (1.16) найти функцию  как функцию первого аргумента
как функцию первого аргумента  Однако для того, чтобы выполнить третий этап, т. е. вычислить интеграл свертки (1.7), удобнее знать функцию
Однако для того, чтобы выполнить третий этап, т. е. вычислить интеграл свертки (1.7), удобнее знать функцию  как функцию второго аргумента, рассматривая при этом
как функцию второго аргумента, рассматривая при этом  как параметр. Это очевидно из формулы (1.7), позволяющей получить изменение величины на выходе
как параметр. Это очевидно из формулы (1.7), позволяющей получить изменение величины на выходе  при любом фиксированном моменте времени
при любом фиксированном моменте времени  простым интегрированием, если функция
простым интегрированием, если функция  задана как функция второго аргумента т.
задана как функция второго аргумента т.

Рис. 1.15. Получение графика функции  по заданной функции
по заданной функции 
Вычисляя интеграл (1.7) для фиксированных значений  можно найти последовательность чисел, определяющих функцию
можно найти последовательность чисел, определяющих функцию 
Отчёт о лабораторной работе
Описание лабораторной установки
Структурная схема лабораторной установки показана на рисунке 1.
Для сравнения, свойства статической и астатической систем исследуются одновременно, при одном входном воздействии x(t). Математическая модель задается передаточной функцией, соответственно, К1(р), К2(р) для статической системы; К3(р), К4(р) для астатической системы.
Рисунок 1 – Структурная схема лабораторной установки
Теоретическая часть
Статическая система
Передаточная функция разомкнутой системы:
Характеристическое уравнение разомкнутой системы:
Передаточная функция замкнутой системы:
Характеристическое уравнение замкнутой системы:
Коэффициент передачи по ошибке регулирования:
Коэффициенты ошибок:
Ошибка регулирования при :
Ошибка регулирования при :
Астатическая система
Передаточная функция разомкнутой системы:
Характеристическое уравнение разомкнутой системы:
Передаточная функция замкнутой системы:
Характеристическое уравнение замкнутой системы:
Коэффициент передачи по ошибке регулирования:
Коэффициенты ошибок:
Ошибка регулирования при :
Ошибка регулирования при :
Диаграммы ошибки регулирования для заданных воздействия приведены наи рисунках 2 и 3.
Рисунок 2 – Ошибка регулирования при воздействии x(t)=1
Рисунок 3 – Ошибка регулирования при воздействии x(t)=0,2t
Расчёт показывает, что ошибка астатической системы меньше, чем статической системы.
Экспериментальное исследование ошибки регулирования
Модель для исследования ошибки регулирования в программе MicroCap показана на рисунке 4.
Диаграммы отклика системы и ошибки регулирования для заданных видов воздействий приведены на рисунках 5 и 6.
Рисунок 4 – Модель для исследования ошибки регулирования
Рисунок 5 – Временные диаграммы отклика и ошибки при воздействии x(t)=1
Параметры переходного процесса:
- перерегулирование – 21,6%;
- длительность переходного процесса – 60 мс;
- декремент затухания колебаний – 0,096.
Рисунок 6 – Временные диаграмма отклика и ошибки при воздействии x(t)=0,2t
Выводы
При выполнении работы было проведено исследование ошибки регулирования в статической и астатической САУ при постоянном и пропорциональном воздействиях. Были выполнен расчёт выражения для ошибки регулирования как функции времени и экспериментальная проверка полученных результатов.
По результатам работы можно сделать следующие выводы:
- Величина ошибки регулирования определяется видом передаточной функции САУ.
- Антистатическая система обеспечивает меньшую ошибку регулирования по сравнению со статической системой.
Контрольные вопросы
- Дать определение понятиям: ошибка регулирования, коэффициент передачи по ошибке.
Ошибка регулирования – разность между требуемым значением регулируемой величины и текущим её значением.
Коэффициент передачи по ошибке регулирования – зависимость ошибки регулирования от воздействия, вызвавшего эту ошибку.
- Перечислить методы определения ошибки регулирования и дать им краткую характеристику.
Метод коэффициентов ошибки используется при полиномиальном входном воздействии.
Итерационный метод используется при сложном входном воздействии.
- Чем отличаются статические системы автоматического регулирования от астатических?
- Какой порядок астатизма необходимо ввести в следящую автоматическую систему, чтобы обеспечить значение установившейся ошибки x(t)=0, если задающее воздействие описывается ограниченно дифференцируемой функцией?
Порядок астатизма должен быть не менее числа ненулевых производных функции, задающей входное воздействие.
- Покажите качественную связь между переходной характеристикой, годографом и ЛАЧХ автоматической системы минимально-фазового типа. Можно ли по виду ЛАЧХ разомкнутой системы судить об устойчивости замкнутой системы?
Значение фазы при любой частоте пропорционально средневзвешенному значению производной от логарифмической амплитудно-частотной характеристики.
По ЛАЧХ разомкнутой системы можно определить запасы устойчивости: запас по фазе m отсчитывается по ЛФХ на частоте среза, а запас по амплитуде соответствует значению ЛАХ на критической частоте, взятому с обратным знаком
Тип работы: Работа Лабораторная
Сдано в учебном заведении: ДО СИБГУТИ
Описание:
Цель работы
Исследование влияния структуры и параметров замкнутой линейной стационарной САУ на величину ошибки регулирования и параметры переходного процесса при детерминированных воздействиях.
СКАЧАТЬ
Необходимо выполнить
следующие задачи:
• Получить математические
модели заданной САУ, используя передаточные
функции и уравнения в пространстве
состояний.
• Исследовать устойчивость
САУ, определить область устойчивости
по коэффициенту усиления разомкнутой
системы.
• Провести анализ
точности работы САУ и скорректировать
параметры алгоритма управления.
• Оценить качество
управления САУ.
• Провести математическое
моделирование САУ в системе МАТLАВ
+ Simulink.
При математическом
моделировании САУ необходимо:
• Построить переходный
процесс и определить показатели качества;
• Проанализировать
точность работы системы (привести
графики входной и выходной координат
и ошибки) при

и

;
• Проанализировать
работу САУ при

и

;
(привести графики входной и выходной
координат и ошибки);
• Проанализировать
работу САУ при синусоидальном входном
сигнале и
.
|
№ варианта |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2,5 |
20 |
1 |
1,5 |
0,8 |
0,01 |
1.25 |
1,0 |
0,005 |
0,015 |
0,02 |
0 |












Передаточные
звенья:


Обозначим
числители и знаменатели передаточных
функций каждого звена

через

и

соответственно, и последовательно
преобразуем многоконтурную САУ в
одноконтурную:



Получим
передаточные функции:
разомкнутой САУ

,
замкнутой системы по входным воздействиям

и

,
по ошибке регулирования относительно
входных воздействий

и

:


Wraz:
24(
0.125 s + 1)
———————————————————-
1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 2.515 s

Wyg:
24(
0.125 s + 1)
———————————————————-
1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24


Weg:
1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 2.515 s
———————————————————-
1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24


Wyz:
0.00006
s^3 + 0.016 s^2 + 0.812 s
———————————————————-
1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24

Wez:
-(0.00006
s^3 + 0.016 s^2 + 0.812 s)
———————————————————-
1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24

We2z:
1.5e-006
s^4 + 0.000535 s^3 + 0.0638 s^2 + 6.327 s+24
———————————————————-
1.5e-006
s^4 + 0.000475 s^3 + 0.0478 s^2 + 5.515 s+24
Используя передаточные
функции по ошибкам найдем коэффициенты
ошибок:
Weg: с0
= 0 c1 = 0.1048 c2 = -0.0442 ; We2z: c0 = 1 c1 = 0.0338 c2 =
-0.0142;
Wez: с0 =
0 c1 = 0.0338 c2 = -0.0169 ;
Выражение для ошибки:


Запишем
уравнения состояния исходной
многоконтурной САУ:

X3(s)
X4(s)
X1(s)
X2(s)







Исследование
устойчивости САУ

Исследование
устойчивости САУ при помощи алгебраического
критерия Льенара – Шипара

Wyg:
0.125
s + 1
———————————————————-
0.0625e-006
s^4 + 0.00001979 s^3 + 0.00199 s^2 + 0.22979 s+1
Составим
матрицу
Гурвица для
характеристического уравнения
передаточной функции

:

Характеристическое
уравнение:




;
Коэффициенты нашей
системы

.
Её порядок равен четырём, поэтому
определим нечётные миноры:
— минор 1-го порядка:

— минор 3-го порядка:

Вывод: Замкнутая
система устойчива согласно
алгебраическому критерию Льенара –
Шипара.
Матрица
Гурвица:

Исследуем
систему на устойчивость по частотному
критерию Найквиста и
проведём анализ устойчивости системы.
ЛАЧХ
и ФЧХ
разомкнутой
системы.
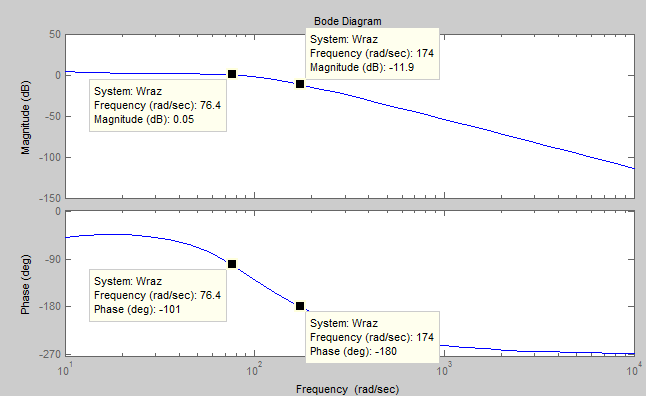

Запасы
устойчивости:

– запас по амплитуде на частоте wa
= 174 (rad/sec)

– запас по фазе на частоте wc
= 76,4 (rad/sec)

= 24

Карта
нулей и полюсов системы:


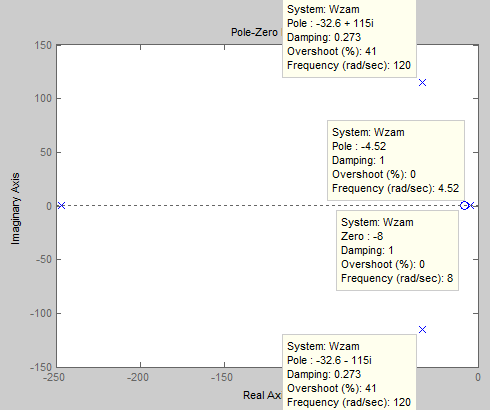

Переходная
функция системы:

Степень устойчивости
время регулирования
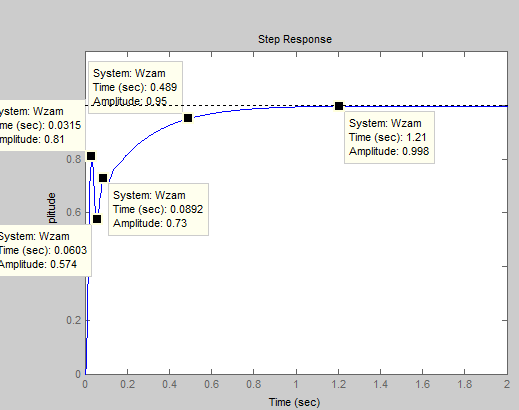
Максимальное значение
переходного процесса max_h_t
= 0,81
Время регулирования
(момент вхождения кривой в 5% трубку)

Перерегулирование

Декремент затухания
переходной функции:
Вывод: Ближайший
корень к мнимой оси: (-4,52). Так как
передаточная функция системы имеет
нули, то оценка качества системы только
по полюсам может дать существенную
погрешность. Поэтому оценка качества
времени регулирования по полюсам
и его реальное значение

не совпадают.
Моделирование САУ
в системе Simulink (+МАТLАВ)
Продемонстрируем
работу САУ при

и
.
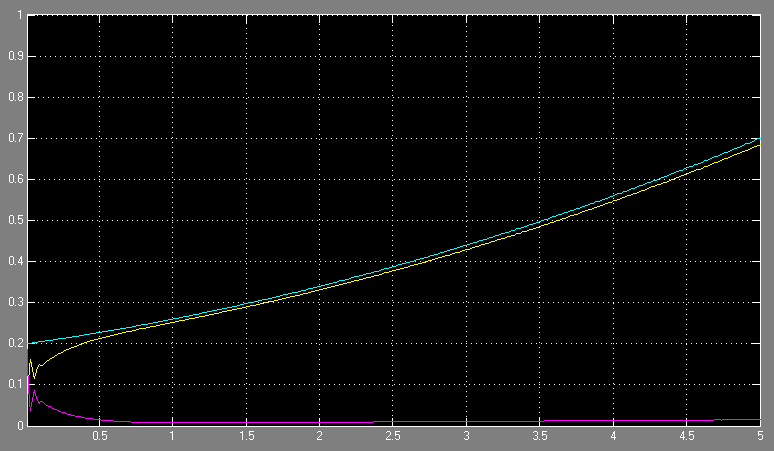

и

.
Продемонстрируем
работу САУ при

и
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Подборка по базе: 3 Метод систематической десенсибилизации и сенсибилизации.docx, Основы контроля и оценки эффективности функционирования логистич, Общий состав и структура персональных электронно-вычислительных , Налоговая Система,Реферат,Пурис (1).docx, Право и правовая система.docx, Маркетинговое исследование.docx, 2. Пирамидная нервная система.pptx, Конструкторская — Системы вентиляции ЭПС.docx, Архитектура информационных систем.doc, Научные основы и инженерные методы выбора систем и схем ВиВ Дудн
Министерство науки и высшего образования Российской Федерации
Федеральное государственной бюджетное образовательное учреждения высшего образования
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра радиотехнических систем (РТС)
«ИССЛЕДОВАНИЕ СЛЕДЯЩИХ СИСТЕМ ПРИ ДЕТЕРМИНИРОВАННЫХ ВОЗДЕЙСТВИЯХ»
Отчет к лабораторной работе по дисциплине
«Радиоавтоматика»
| Выполнили: студенты гр. 129
____________ Кручинин Н. А. ____________ Гаврилин М. А. ____________ Хакимова Э. Р. ____________ Куприц В. Ю. «____» _____________ 2021 г. |
Томск 2021
Оглавлени
1Введение 3
2Результаты работы 4
3Заключение 16
Оглавление 2
1 Введение 3
2 Результаты работы 4
3 Заключение 16
-
Введение
Целью работы является ознакомление с возможностями системы Simulink для моделирования следящих систем и исследование их поведения в переходном и установившемся режимах при некоторых типовых воздействиях.
-
Результаты работы
Создать модель следящей системы с фильтром в контуре управления, передаточная функция которого имеет вид:
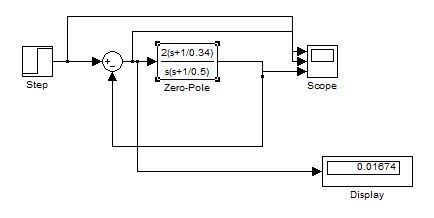
Рис. 2.1 – Модель следящей системы
Подать на вход модели ступенчатый сигнал (Step) и исследовать зависимость длительности переходного процесса от параметров фильтра ( ,
,  ,
,  ) в контуре управления и представить эти зависимости в виде графиков.
) в контуре управления и представить эти зависимости в виде графиков.
| Таблица 2.1 – Длительность ПП при изменении |
|||
| |
|
|
 |
| 1 | 0,34 | 0,5 | 3,2 |
| 2 | 0,34 | 0,5 | 1,6 |
| 3 | 0,34 | 0,5 | 1,17 |
| 4 | 0,34 | 0,5 | 0,845 |
| 5 | 0,34 | 0,5 | 0,733 |
| 6 | 0,34 | 0,5 | 0,632 |
| 7 | 0,34 | 0,5 | 0,63 |
| 8 | 0,34 | 0,5 | 0,57 |
| 9 | 0,34 | 0,5 | 0,52 |
| 10 | 0,34 | 0,5 | 0,288 |
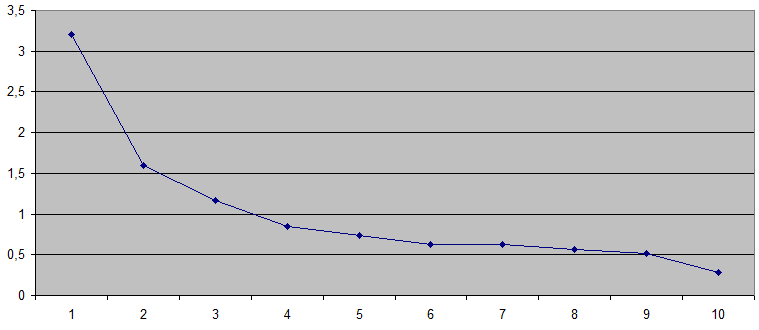
Рис. 2.2 – График зависимости 
| Таблица 2.2 – Длительность ПП при изменении |
|||
| |
|
|
|
| 2 | 0,001 | 0,5 | 1,81 |
| 2 | 0,04 | 0,5 | 2,29 |
| 2 | 0,24 | 0,5 | 1,5 |
| 2 | 0,44 | 0,5 | 2,6 |
| 2 | 0,1 | 0,5 | 2,2 |
| 2 | 0,01 | 0,5 | 1,54 |
| 2 | 0,07 | 0,5 | 1,74 |
| 2 | 0,09 | 0,5 | 2,03 |
| 2 | 0,14 | 0,5 | 2,69 |
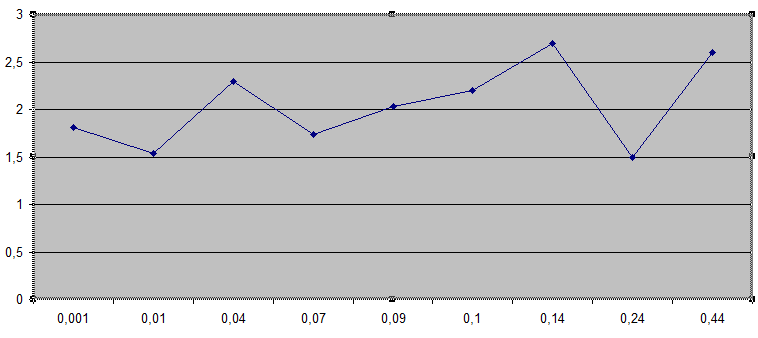
Рис. 2.3 – График зависимости 
| Таблица 2.3 – Длительность ПП при изменении |
|||
| |
|
|
|
| 2 | 0,34 | 1,5 | 4,2 |
| 2 | 0,34 | 2,5 | 4 |
| 2 | 0,34 | 3,5 | 4 |
| 2 | 0,34 | 4,5 | 4 |
| 2 | 0,34 | 9,5 | 4 |
| 2 | 0,34 | 20 | 4 |
| 2 | 0,34 | 1 | 4,4 |
| 2 | 0,34 | 1,2 | 4,4 |
| 2 | 0,34 | 2,9 | 4 |
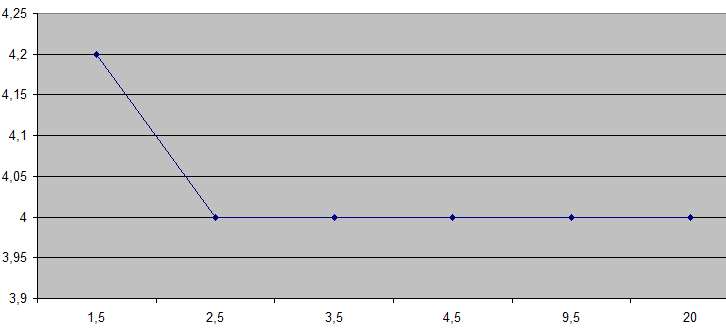
Рис. 2.4 – График зависимости 
Исследовать зависимость величины перерегулирования от соотношения между параметрами фильтра в контуре управления. (Фиксируются два параметра и исследуется зависимость от третьего).
Перерегулирование  высчитываем по формуле
высчитываем по формуле
где  – величина максимального отклонения управляемой величины;
– величина максимального отклонения управляемой величины;  – установившееся значение в переходном режиме.
– установившееся значение в переходном режиме.
| Таблица 2.4 – Зависимость величины перерегулирования от |
|||
| |
|
|
|
| 1 | 1,005 | 1 | 0,5% |
| 2 | 1,0238 | 1 | 2,3% |
| 3 | 1,032 | 1 | 3,2% |
| 4 | 1,038 | 1 | 3,8% |
| 5 | 1,0355 | 1 | 3,5% |
| 6 | 1,036 | 1 | 3,6% |
| 7 | 1,0341 | 1 | 3,4% |
| 8 | 1,033 | 1 | 3,3% |
| 9 | 1,032 | 1 | 3,2% |
| 10 | 1,024 | 1 | 2,4% |
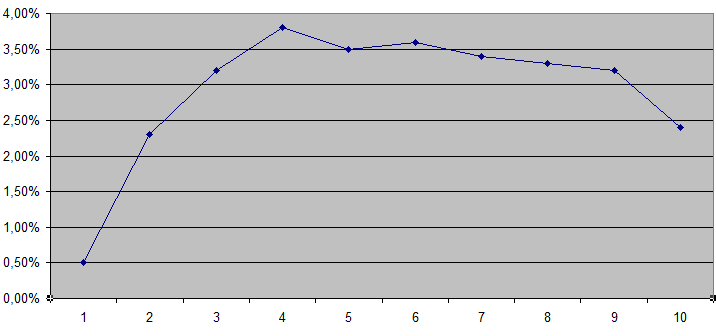
Рис. 2.5 – График зависимости 
| Таблица 2.5 – Зависимость величины перерегулирования от |
|||
| |
|
|
|
| 0,001 | 1,815 | 1 | 81,5% |
| 0,002 | 1,788 | 1 | 78,8% |
| 0,007 | 1,63 | 1 | 63% |
| 0,009 | 1,59 | 1 | 59% |
| 0,04 | 1,58 | 1 | 58% |
| 0,14 | 1,55 | 1 | 55% |
| 0,24 | 1,5 | 1 | 50% |
| 0,01 | 1,62 | 1 | 62% |
| 0,44 | 1,002 | 1 | 0,2% |
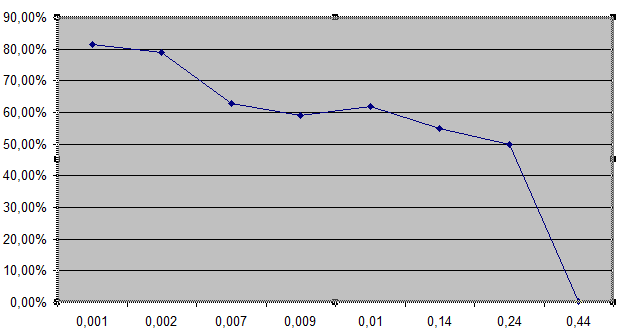
Рис. 2.6 – График зависимости 
| Таблица 2.6 – Зависимость величины перерегулирования от |
|||
| |
|
|
|
| 1,5 | 1,19 | 1 | 19% |
| 2,5 | 1,25 | 1 | 25% |
| 3,5 | 1,28 | 1 | 28% |
| 4,5 | 1,29 | 1 | 29% |
| 9,5 | 1,32 | 1 | 32% |
| 20 | 1,34 | 1 | 34% |
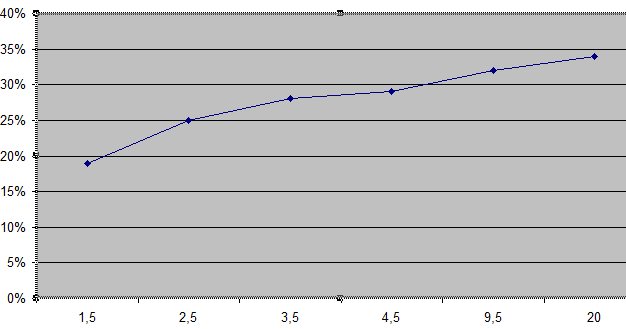
Рис. 2.7 – График зависимости 
Снять зависимости установившегося значения ошибки слежения и длительности переходного процесса от коэффициента усиления фильтра в контуре управления.
| Таблица 2.7 – Значения ошибки и коэффициента усиления |
|
| |
Показания дисплея |
| 1 |  |
| 2 |  |
| 3 |  |
| 4 |  |
| 5 |  |
| 6 |  |
| 7 | 0 |
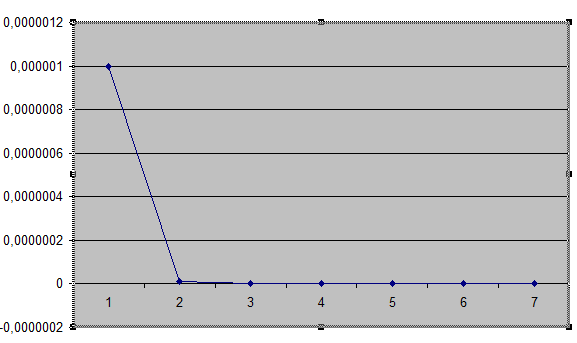
Рис. 2.8 – Зависимость установившегося значения ошибки от коэффициента усиления
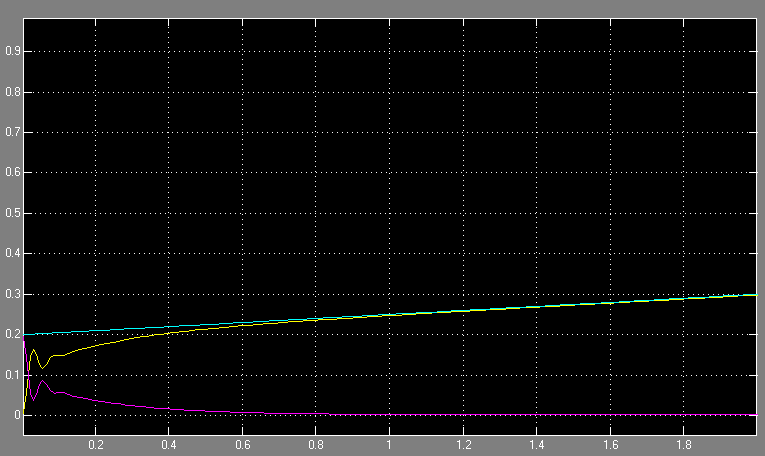
Определить реакцию системы на линейное воздействие (Ramp) и снять зависимости установившегося значения ошибки слежения и длительности переходного процесса от коэффициента усиления фильтра в контуре управления.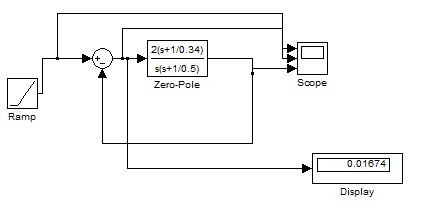
Рис. 2.9 – Модель следящей системы при линейном воздействии
| Таблица 2.8 – Значения ошибки и коэффициента усиления |
||
| |
Показания дисплея | |
| 1 | 0.02 | 2.2 |
| 2 | 0.01 | 1.9 |
| 3 | 0.007 | 1.8 |
| 4 | 0.005 | 1.6 |
| 5 | 0.004 | 1.3 |
| 6 | 0.0035 | 1.1 |
| 7 | 0.0032 | 1 |
| 8 | 0.0024 | 0.9 |
| 9 | 0.002 | 0.8 |
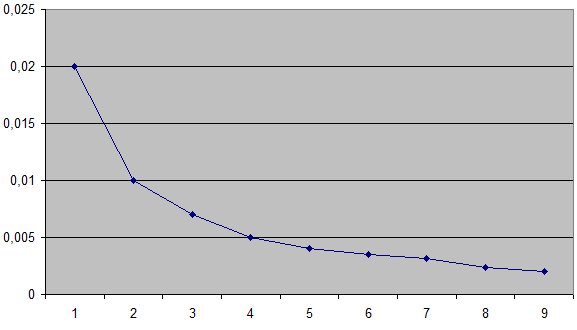
Рис. 2.10 – Зависимость установившегося значения ошибки от коэффициента усиления
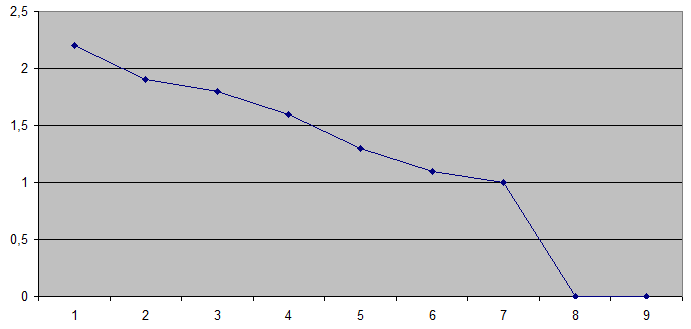
Рис. 2.11 – Зависимость установившегося значения ошибки от длительности ПП
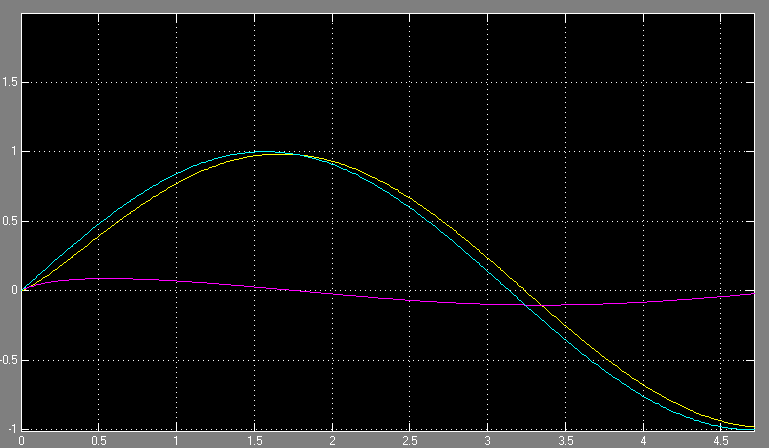
Установить фильтр и исследовать поведение ошибки слежения при ступенчатом, линейном и квадратичном воздействиях. Квадратичное воздействие сформировать путем последовательного соединения блоков Ramp и интегратора.
Ошибки:
Квадратичное воздействие: 0,17
Линейное воздействие: 
Ступенчатое воздействие:
-
Заключение
В ходе лабораторной работы определили реакцию системы на линейное воздействие (Ramp) и ступенчатый сигнал (Step). Исследовали зависимость длительности переходного процесса от параметров фильтра, установили зависимость величины перерегулирования от соотношения между параметрами фильтра в контуре управления, сняли зависимость установившегося значения ошибки слежения и длительности переходного процесса от коэффициента усиления фильтра в контуре управления. Минимальная ошибка при линейном воздействии.