Точность системы автоматического управления Статическая ошибка системы
В системах
автоматического управления часто
приходится решать задачу стабилизации
управляемой величины. Точность поддержания
требуемого значения управляемой величины
в такой системе можно оценить как разницу
между заданным значением управляемой
величины и её установившимся значением
в системе после окончания переходного
процесса:
![]() .
.
Эта величина
получила название статической ошибки
системы. При вычислении статической
ошибки предполагается, что система
находится в статике и все сигналы в ней
имеют постоянные величины. Статическая
ошибка используется для оценки точности
установления в системе заданной
постоянной выходной величины после
окончания переходного процесса.
Используя
передаточную функцию замкнутой системы
по ошибке, для изображения ошибки в
системе можно записать
![]() ,
,
где![]() передаточная
передаточная
функция замкнутой системы по ошибке,![]() изображение
изображение
задающего воздействия.
Для статики,
когда все сигналы в системе неизменны,
выражение для ошибки можно перенести
в область оригиналов
![]() .
.
Поскольку
![]() ,
,
гдеW(p)
– передаточная функция разомкнутой
системы, то статическую ошибку системы
можно вычислить, зная передаточную
функцию разомкнутой системы:
![]() ,
,
где![]() .
.
Вместо
абсолютного значения статической ошибки
часто используют относительную
статическую ошибку
![]() .
.
Если система
статическая (т.е. не содержит интегрирующих
звеньев), то передаточную функцию
разомкнутой системы можно представить
в следующем нормированном виде:
![]() ,
,
гдеK– коэффициент
усиления системы,A*(p),B*(p)
– нормированные полиномыA(p)
иB(p).
При этом![]() и
и![]() .
.
Тогда![]() и статическая ошибка в статической
и статическая ошибка в статической
системе
![]() .
.
Статическая
ошибка в статической системе уменьшается
с увеличением коэффициента усиления
системы. Статическая система всегда
будет иметь некоторую ошибку. Физический
смысл такой ошибки заключается в
необходимости некоторого рассогласования
между задающей и выходной величинами
системы для получения сигнала управления.
Если в системе
управления имеются интегрирующие
звенья, то система будет астатической.
Для астатической системы первого порядка
(содержащей одно интегрирующее звено)
передаточная функция разомкнутой
системы
![]()
и передаточная функция замкнутой системы
по ошибке
 .
.
В этом случае всегда
![]() и, следовательно, статическая ошибка
и, следовательно, статическая ошибка
астатической системы будет равна нулю.
Таким образом, статическая ошибка в
астатической системе в принципе
отсутствует, что обуславливает более
высокую точность астатических систем,
по сравнению со статическими системами.
В астатической системе автоматического
управления установившееся значение
управляемой величины равно заданному
значению этой величины.
Вынужденная ошибка системы
Процесс в
системе складывается из свободного
процесса и вынужденного процесса:
![]() .
.
Для
устойчивой системы свободный процесс
по истечении времениtпзатухает и в системе устанавливается
вынужденный процесс
![]()
Точность
поддержания заданного значения
управляемой величины в вынужденном
режиме характеризуется вынужденной
ошибкой системы
![]() .
.
Вынужденная
ошибка хорошо характеризует работу
системы автоматического управления в
том случае, когда изменения управляющего
воздействия происходят существенно
медленнее собственных переходных
процессов в системе и последними можно
пренебречь.
Рассмотрим
вычисление вынужденной ошибки системы
автоматического управления. Изображение
для вынужденной ошибки
![]() .
.
В общем случае
![]() является дробно-рациональной функцией
является дробно-рациональной функцией
отpи ее можно разложить
в ряд Тейлора по степенямрвблизи![]() , тогда
, тогда
![]() и
и
выражение для вынужденной ошибки системы
примет вид
![]() где
где![]() постоянные
постоянные
коэффициенты.
Для полученного
изображения вынужденной ошибки на
основе свойств преобразования Лапласа
легко находится выражение для оригинала
ошибки
![]()
где
![]() ,
,![]() ,
,![]() …коэффициенты
…коэффициенты
ошибок, полученные выше (C0– коэффициент статической ошибки,C1
– коэффициент скоростной ошибки и
т. д.).
Коэффициенты
ошибки могут быть также получены делением
числителя передаточной функции на ее
знаменатель. Полученное выражение для
вынужденной ошибки позволяет оценить
точность системы автоматического
управления в установившемся режиме.
Вынужденная ошибка, например, хорошо
характеризует точность работы следящих
систем автоматического управления.
Соседние файлы в папке ТАУ
- #
- #
- #
Щербаков В.С. и др. Элементы автоматики и системы автоматического управления — файл n1.doc
приобрести
Щербаков В.С. и др. Элементы автоматики и системы автоматического управления
скачать (618.5 kb.)
Доступные файлы (1):
- Смотрите также:
- Барышев Г.А., Муромцев Д.Ю. Основы автоматики и системы автоматического управления. Лабораторный практикум (Документ)
- Келим Ю.М. Основы автоматики предприятий почтовой связи (Документ)
- Красовский А.А., Вавилов Ю.А., Сучков А.И. Системы автоматического управления летательных аппаратов (Документ)
- Рубанов В.Г. Линейные системы автоматизированного управления (САУ) (Документ)
- Маругин А.П. Элементы систем автоматики (Документ)
- Маругин А.П. Элементы систем автоматики (Документ)
- Глазырин А.С. Элементы системы автоматики. Практикум (Документ)
- Нетушил А.В. Теория автоматического управления (Документ)
- Кузнецов В.П., Лукьянец С.В., Крупская М.А. Теория автоматического управления. Часть 1: Линейные непрерывные системы (Документ)
- Соломенцев Ю.М. Теория автоматического управления (Документ)
- Теория автоматического управления (Документ)
- Барашко О.Г. Автоматика, автоматизация и автоматизированные системы управления (Документ)
n1.doc
ИССЛЕДОВАНИЕ РАБОТЫ СЛЕДЯЩЕГО ПРИВОДА
Цель работы: изучение принципа действия электрической следящей системы и экспериментальное определение статической ошибки.
- Общие положения
Следящие системы – это устройства автоматического управления, предназначенные для воспроизведения величины, изменяющейся по произвольному закону.
Следящие системы можно разделить на две основные группы:
а) самосинхронизирующиеся следящие системы;
б) следящие системы с искусственной внешней синхронизацией при помощи обратных связей.
К самосинхронизирующимся следящим системам, в которых с определенной степенью точности осуществляется синхронное и синфазное перемещение двух или нескольких не связанных между собой механических валов, относятся следящие приводы. Следящим приводом называется устройство, при помощи которого объект регулирования с определенной точностью воспроизводит движение, задаваемое следящим органом.
Следящий привод, включающий элементы автоматического управления, позволяет воспроизводить требуемые перемещения в широких пределах по произвольному закону от устройства (датчика), задающего этот закон, что обуславливает его широкое применение. Следящий привод может использоваться для автоматического контроля за изменением различных физических величин, для автоматического управления поворотом массивных платформ на заданный угол, например, в экскаваторах, в системе автоматического вождения автомобиля, при автоматизации процессов управления землеройно-планировочными машинами.
В данной работе рассматривается синхронно следящий привод, который состоит из сельсина-датчика (задающий орган, сельсина-трансформатора (датчика угла поворота объекта), фазочувствительного электронного усилителя и исполнительного двигателя, перемещающего какой-либо объект. Структурная схема следящего привода приведена на рис.5.1.

ЭС
Рис. 5.1. Структурная схема следящего привода: ЗО – задающий орган; У – усилитель; ИО – исполнительный орган; О – объект регулирования; Д – датчик; ЭС – элемент сравнения
Элементы следящего привода соединены между собой так, что изменение в положении датчика воздействует через элемент сравнения и усилитель на исполнительный двигатель, который отрабатывает заданную величину перемещения. Процесс работы следящего привода сводится к автоматическому устранению возникающего рассогласования.
Синхронноследящие приводы с электронными усилителями обладают следующими достоинствами:
- быстрое протекание переходных процессов благодаря сравнительно малой инерционности системы управления;
- отсутствие вращающихся и трущихся частей в усилителе.
К недостаткам системы можно отнести:
- ограниченную мощность исполнительного двигателя;
- сравнительно большую ошибку в слежении при установившемся режиме;
- чувствительность работы системы к колебаниям напряжения сети.
Особенности работы системы синхронно следящего привода выявляются при анализе ее статических и динамических характеристик.
Под статическими характеристиками следящего привода понимают зависимость момента, тока и других параметров в схеме от величины угла рассогласования в установившемся режиме, когда отработка угла исполнительным двигателем происходит с неизменной скоростью. Однако только статические характеристики неполно характеризуют работу следящего привода. Необходимо, кроме статических характеристик, знать также и динамические свойства системы, определяющие устойчивость, величину угла рассогласования в переходном режиме, время переходного режима и т.п. Эти свойства системы анализируются на основании уравнений переходного режима. В данной работе изучаются только статические характеристики.
Важной характеристикой следящего привода является статическая ошибка, которая в данном случае представляет собой разность между углом поворота ротора сельсина-датчика (задающий орган) и углом поворота объекта (вала исполнительного двигателя). Статическая ошибка измеряется после прохождения всех переходных процессов, после полной остановки двигателя. Статическая ошибка зависит от состояния вращающихся частей: трения, момента сопротивления повороту двигателя, от колебаний напряжения сети и от инерционности вращаемого объекта.
- Вопросы допуска к лабораторной работе
- Что следует понимать под следящей системой и следящим приводом?
- Область применения следящего привода.
- Элементы следящего привода.
- Достоинства и недостатки синхронно-следящего привода с электронным усилителем.
- Характеристики, применяемые при анализе работы синхронно следящего привода.
- Описание лабораторного стенда
Синхронно следящий привод малой мощности с электронным усилителем смонтирован на лабораторном стенде. Электрическая схема стенда представлена на рис. 5.2. В его схему входят: сельсин-датчик СД со шкалой, сельсин-приемник (сельсин-трансформатор) СТ, электронный фазочувствительный усилитесь, исполнительный двигатель М. Исполнительным двигателем является двухфазный асинхронный двигатель, который обычно применяется для маломощных следящих приводов. На валу исполнительного двигателя находится стрелка, которая в данном случае является объектом регулирования. Стрелка перемещается по круговой шкале.
Принцип работы следящего привода заключается в следующем. При повороте ротора сельсина-датчика СД в однофазной обмотке сельсина-трансформатора СТ наводится ЭДС (напряжение ошибки) и поступает на вход усилителя. На выходе усилителя одна статорная (управляющая) обмотка ?1 исполнительного двигателя. Другая статорная обмотка ?2. включена в переменное напряжение сети через конденсатор, который создает между токами в статорных обмотках сдвиг фаз примерно в 90°.
Исполнительный двигатель М приходит во вращение и перемещает управляемый объект и ротор сельсина-трансформатора CТ. Вращение двигателя происходит до тех пор, пока не произойдет согласование углов поворота входного и выходного валов, при котором напряжение ошибки равно нулю. Для реверсирования исполнительного двигателя в системе необходимо изменить направление рассогласования, что осуществляют изменением направления вращения ротора сельсина-датчика. При этом изменяется фаза напряжения ошибки на 1800 и исполнительный двигатель реверсируется.

Рис. 5.2. Принципиальная схема следящего привода
4. Задание на выполнение работы
1. Сделать отсчет статической ошибки по круговой шкале измерений.
2. Построить график кривой статических ошибок ![]() n = ѓ(?).
n = ѓ(?).
3. Произвести расчет среднего значения статической ошибки.
- Порядок выполнения работы
- Собрать схему следящего привода (см. рис.5.2).
- Проверить работоспособность следящего привода. Для этого, поворачивая ротор сельсина-датчика по часовой стрелке и против, убедиться, что стрелка, связанная с исполнительным двигателем, поворачивается в ту же сторону.
- Установить ротор сельсина-датчика на нуль по его шкале и убедиться, что стрелка на валу двигателя останавливается в пределах 1. Если этого нет, то расстопорить стрелку и установить в соответствующее положение.
4. Последовательно вращая ротор сельсина-датчика против часовой стрелки и останавливая через 30°, определить установившиеся значения положения стрелки, связанной с двигателем.
5. Выполнить п.4 с поворотом в противоположную сторону.
- Результаты измерений занести в табл. 5.1, где ? – угол поворота задатчика, град; n1 и n2 – угол поворота стрелки исполнительного механизма, град, соответственно по и против часовой стрелки.
- Определить статические ошибки ? n1 и ? n2 по формулам:
?n1 =│? – n1│ , ?n2 = │? – n2│.
Таблица 5.1
| ? | 0 | 30 | 60 | 90 | 120 | 150 | 180 | 210 | 240 | 270 | 300 | 330 | 360 |
| n1 | |||||||||||||
| n2 | |||||||||||||
| ?n1 | |||||||||||||
| ?n2 |
- Содержание отчета
1. Название и цель работы.
2. Электрическая схема следящего привода.
3. Результаты измерений, представленные в виде таблицы, и расчет
средней статической ошибки.
7.Контрольные вопросы
- Принцип работы синхронно следящего привода.
- Объясните, что следует понимать под статической ошибкой следящей системы?
- Чем объяснить возникновение статической ошибки системы?
- Как определить статическую ошибку следящей системы?
- Каким образом можно изменить направление вращения исполнительного двигателя, не меняя направления вращения сельсина-датчика?
Библиографический список
- Бородин И. Ф. Технические средства автоматики: Учебник для вузов/ И.Ф. Бородин. – М.:Колос, 1982. – 303 с.
- Казаков А. А. Стационарные устройства автоматики и телемеханики: Учебник/А.А. Казаков, В.Д. Бубнов, Е.А. Казаков. – М.: Транспорт, 1990. – 431 с.
- Кузнецов Е.С. Управление техническими системами: Учеб. пособие/Е.С. Кузнецов; МАДИ(ТУ). – 3-е изд., перераб. и доп. М., 2001. – 262 с.
- Курсовое и дипломное проектирование по автоматизации технологических процессов: Учеб. пособие для вузов/Ф.Я. Изаков, В.Р. Казадаев, А.Х. Ройтман, Б.В. Шмаков. – М.:Агропромиздат, 1988.–183 с.
Учебное издание
ЭЛЕМЕНТЫ АВТОМАТИКИ
И СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к лабораторным работам
Составители:
Виталий Сергеевич Щербаков
Алексей Александрович Руппель
Виталий Алексеевич Глушец
* * *
Редактор Н.И. Косенкова
Лицензия ИД № 00064 от 16.08.99
Подписано к печати 2003
Формат 60х90 1/16. Бумага писчая
Оперативный способ печати
Гарнитура Times New Roman
Усл. п. л. 2,75 , уч. — изд. л. 2,75
Тираж 300 экз. Изд. № 44. Заказ
Цена договорная
Издательство СибАДИ
644099, Омск, ул. П.Некрасова, 10
Отпечатано в ПЦ издательства СибАДИ
644099, Омск, ул. П.Некрасова, 10
ИССЛЕДОВАНИЕ РАБОТЫ СЛЕДЯЩЕГО ПРИВОДА
Лабораторная работа N 1
ИССЛЕДОВАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С РЕОСТАТНОЙ ОБРАТНОЙ СВЯЗЬЮ
Цель работы: Ознакомиться с принципом работы и устройством следящей САР с реостатной обратной связью на постоянном токе; исследовать статическую характеристику системы; определить качество процесса регулирования.
Инструмент и принадлежности к работе
1. Лабораторная установка 1 шт.
2. Цифровая измерительная установка Ф-5071/75 1 шт.
Основные положения
Следящей САР называется такая система, алгоритм функционирования которой содержит предписание изменять управляемую величину в зависимости от неизвестного заранее значения переменной величины на входе автоматической системы. Следящие системы являются частью семейства систем, известных как системы регулирования с обратной связью. Широко распространены дистанционные следящие системы воспроизведения угла и линейных перемещений. Дистанционные следящие системы применяются для управления станками, дистанционной передачи информации, управления антеннами, положением орудий, в управлении высотой и курсом самолёта с помощью автопилота, в счётно-решающих устройствах и др.
Функциональная схема следящей САР в общем виде приведена на рис. 1. Специфика работы систем, описанных выше, связана с требованиями получения необходимой точности передачи угловых и линейных перемещений.
Рис. 1. Функциональная схема следящей САР.
Существует большое множество следящих систем, отличающихся принципом действия, структурными элементами, принципом управления, исполнительным устройством, родом источников питания и пр.
По методу сравнения сигналов следящие системы могут быть аналоговыми, в которых сигнал рассогласования выделяется различными методами в аналоговой форме, цифровыми, в которых задающим устройством является ЭВМ, а сигнал рассогласования выделяется в цифровой форме в виде кода, и цифро-аналоговыми.
По структурной схеме следящие системы могут быть одно- и двухканальными, с одним или несколькими принимающими устройствами, с последовательными или параллельными корректирующими устройствами, простыми и взаимосвязанными сложными и т.п.
На практике наиболее распространёнными являются одноканальные следящие системы. Для повышения точности применяются двухканальные следящие системы, известные как системы с грубого и точного отсчётов.
В случае, когда суммарная погрешность исчисляется угловыми секундами при большом передаточном отношении электрической редукции, применяются трёхканальные следящие системы.
По типу измерительных элементов следящие системы могут иметь индуктивные, индукционные, потенциометрические, фотоэлектрические, ёмкостные, генераторные и другие датчики.
По типу исполнительных устройств следящие системы могут быть гидравлическими, пневматическими и комбинированными (с муфтами), с электродвигателями переменного и постоянного токов, шаговыми двигателями, моментными двигателями и т.п.
В зависимости от типа исполнительных устройств в маломощных системах применяются, главным образом, полупроводниковые усилители постоянного и переменного токов. В системах средней мощности возможно применение магнитных и тиристорных усилителей. В мощных системах применяются электромашинные усилители и тиристорные преобразователи.
По принципу управления исполнительным двигателем наибольшее распространение имеют следящие системы непрерывного действия с пропорциональным изменением сигнала. На обмотку управления двигателем подаётся напряжение, пропорциональное углу рассогласования, и, соответственно, частота вращения исполнительного двигателя пропорциональна сигналу рассогласования.
Применяется также управление релейного типа, при котором на обмотку управления двигателя при определённом угле рассогласования или при определённом значении управляющего сигнала подаётся максимальное напряжение. При частотном управлении двигателем на обмотку управления подаются импульсы определённой длительности во времени, но изменяется частота их следования или при постоянной частоте следования импульсов изменяется их длительность. При этом частота вращения двигателя пропорциональна частоте импульсов или соответственно длительности импульсов.
Возможны схемы управления, в которых при малом рассогласовании имеется линейный участок изменения сигнала, а при каком-то заданном угле рассогласования применяется релейное управление.
При создании следящих систем в технических требованиях задаются следующие параметры: точность, диапазон работы, максимальная скорость и ускорение входной оси, величина, и характер нагрузки, род источника, питания, габариты и надежность, а также условия эксплуатации систем – температура, влажность окружающей среды, вибрации и пр. В соответствии с этими требованиями предварительно выбирают измерительные элементы, отвечающие требованиям точности в заданном диапазоне работ.
Исходя из значений нагрузки, скорости и ускорения, а также из режима работы, выбирают исполнительное устройство и передаточное отношение редуктора привода. В маломощных следящих системах в качестве исполнительного элемента получили широкое распространение двухфазные асинхронные двигатели. При проектировании необходимы малые люфты и малый момент инерции редуктора. Момент инерции редуктора должен быть меньше момента инерции ротора двигателя, поэтому необходимо предельно уменьшать момент инерции трибки на валу двигателя. Для уменьшения диаметра шестерни, зацепляющейся с трибкой, передаточное отношение первой пары шестерён редуктора следует выбирать в пределах 2-3, передаточное отношение второй пары должно быть не более 4-6. Приведенный момент инерции последующих пар будет пренебрежимо малым. Тип усилителя и входящие в него преобразовательные элементы выбирают в соответствии с выходными параметрами измерительных элементов (выходным сопротивлением приемника, остаточным и максимальным выходными напряжениями приёмника и т. д.) и исполнительного элемента (сопротивлением нагрузки и максимальной выходной мощностью) с учётом принципа управления двигателем. В маломощных следящих системах используются полупроводниковые усилители. Постоянные времени всех цепей и элементов, коэффициенты усиления преобразователей и усилителей, передаточные отношения и прочие параметры элементов определяются расчётным или экспериментальным путем, а также по справочным данным. Далее выбирается структурная схема и составляются дифференциальные уравнения звеньев системы и передаточные функции звеньев для расчёта системы на устойчивость и выбора корректирующих цепей в целях обеспечения необходимого запаса устойчивости и необходимого качества переходного процесса.
При расчете погрешностей следящих систем учитывают, что суммарная погрешность состоит из статической Δφст динамической Δφдин погрешностей.
Статическая погрешность следящей системы представляет собой разность между угловыми наложениями входной и выходной осей после отработки двигателем системы заданного угла. Эта погрешность складывается из погрешностей измерительных элементов Δφиз датчика и приёмника системы, погрешностей преобразователей аналоговых сигналов в код в цифровых следящих системах Δφак, погрешности зоны нечувствительности Δφ3,.обусловленной моментом нагрузки, погрешности от дрейфа нулевого положения датчика и приемника, усилительно-преобразовательного устройства Δφз погрешности изготовления зубчатых колёс редуктора в системах грубого и точного отсчётов Δφзк погрешности люфта в них Δφл. Часто необходимо учитывать погрешности от температуры окружающей среды Δφt изменения напряжения и частоты питания и от каких-либо других факторов. Так как перечисленные источники погрешностей являются взаимно независимыми, суммарную погрешность можно определить как среднеквадратическую, т. е.:
![]() .
.
Динамическая погрешность следящей системы Δφдин представляет собой разность между угловыми положениями входной и выходной осей при произвольном законе вращения входной оси. Слежение за положением входной оси осуществляется с определённой точностью в зависимости от выбранных параметров системы. Оценку динамической погрешности, как правило, производят либо при непрерывном вращении, либо при гармонических колебаниях входной оси. При допустимой динамической погрешности требуемый переходной процесс должен обеспечиваться выбором необходимых корректирующих устройств и их параметров. Погрешность в установившемся режиме при вращении входной оси с постоянной скоростью называют кинетической погрешностью. Она зависит от коэффициента усиления усилителя и параметров следящей системы. Отношение частоты вращения входного вала системы к установившемуся значению скоростной погрешности Δφск носит название добротности системы по скорости К: Δφск = Ωвх/К.
Перечисленные динамические погрешности должны быть либо одного порядка со значением основной погрешности – погрешности измерительных элементов, либо меньше её даже в тех случаях, когда погрешность измерительных элементов исчисляется угловыми секундами. Таким образом, суммарная погрешность всей системы ΔφΣ может быть определена как
![]() .
.
На рисунке 2 представлена следящая система автоматического регулирования (САР), состоящая из потенциометра-датчика ПД и потенциометра-приёмника ПП, включенных параллельно к общему источнику питания Uп. Подвижные контакты потенциометров соответственно соединены механически с задающим и исполнительным рабочими органами. Напряжение Uс, снимаемое с подвижных контактов потенциометров, является напряжением сигнала рассогласования системы. При согласованном положении рабочих органов, когда φд = φп, напряжение сигнала равно нулю. Напряжение сигнала рассогласования Uс поступает на вход электронного усилителя У, а далее на исполнительный асинхронный двигатель Д. Вал двигателя через зубчатую передачу связан с подвижным контактом потенциометра приёмника. Система работает на устранение ошибки рассогласования. Для отсчёта углов поворота задающего и исполнительного органов применена цифровая измерительная установка Ф-5071/75, в качестве датчиков угла поворота используются сельсины СД1 и СД2, кинематически связанные c задающими и исполнительными рабочими органами. Отсчётным устройством служат блоки индикации Х и Z.

Рис. 2. Следящая САР угла поворота.
Порядок выполнения работы
- Включить установку в сеть 220 В.
- Включить питание установки и прогреть в течение 3 минут.
- Установить шкалу потенциометра-датчика на «НОЛЬ».
- Нажать на блоках индикации X, Z кнопку «СБРОС».
- Установить минимальный коэффициент усиления усилителя при помощи ручки регулятора «УСИЛЕНИЕ».
- Поворачивая движок потенциометра-датчика по часовой стрелке на углы кратные 20˚, снять показания значений угла поворота с блоков индикации Х и Z (Х – угол поворота потенциометра-датчика, Z – угол поворота потенциометра-приемника). После поворота на 360˚ измерения повторить, поворачивая рукоятку против часовой стрелки.
- Пункты 3-6 повторить для среднего и максимального значения коэффициента усиления усилителя.
- Полученные данные занести в таблицу.
|
№ |
По часовой стрелке |
Против часовой стрелки |
||||
|
Х |
Z |
σ |
Х |
Z |
σ |
|
- Определить для каждого направления вращения потенциометра-датчика и коэффициента усиления усилителя максимальную погрешность передачи угла в установившемся режиме σ = X – Z.
- Построить график зависимости z = f(x) для поворота по часовой и против часовой стрелки.
Содержание отчёта
- Результаты измерений в виде таблицы.
- Графики зависимости z = f(x) для различных коэффициентов усиления.
- Выводы по работе.
Контрольные вопросы к лабораторной работе
- Принцип действия и классификация следящих САР.
- Основные источники погрешностей следящих САР.
- Потенциометрические следящие САР угла поворота.
- Какие параметры задаются в технических требованиях при создании следящих систем?
- Как определить добротность следящей САР?
В
любой реальной CАУ
невозможно точное равенство задающего
воздействия g
и управляемой величины y.
Ошибку САУ при этом вычислим согласно
уравнению ошибки как разность этих
воздействий, т.е.:

Учитывая
историю переходных процессов, ошибку
можно представить в виде двух составляющих:
установившейся (статической) и переходной
(динамической):

В
линейных САУ установившаяся (статическая)
ошибка определяется частным решением
её дифференциального уравнения, а
переходная (динамическая) ошибка –
решением однородного дифференциального
уравнения.
Таким
образом, установившуюся ошибку САУ в
неподвижном состоянии называют
статической, а ошибку при переходных
режимах – динамической.
Текущая
ошибка отработки переменного сигнала
называется динамической ошибкой САУ.
Динамическая ошибка системы изменяется
с течением времени. Она зависит от
структуры, параметров и характера
изменения воздействий САУ.
38 Повышение качества и синтез линейных сау
В
системе регулирования по отклонению
установившаяся [ошибка имеет три
составляющие:

(5—24)
|
где
![]()
—
ошибка воспроизведения задающего
воздействия![]()
—
ошибка, вызываемая действием возмущений;![]()
—
ошибка чувствительного элемента,
измеряющего рассогласование
Как
было показано в гл. 4, установившаяся
ошибка может [быть представлена в виде
ряда (4.3). При этом коэффициенты [ошибок
воспроизведения
![]()
вычисляют
по передаточной функции
![]()
замкнутой
системы для ошибки воспроизведения
Нужно,
заметить, что в статической системе

где
k
—
передаточный коэффициент разомкнутой
системна;![]()
—
передаточный коэффициент прямой, цепи
от возмущения
![]()
до
выходной координаты у.
Следовательно,
уменьшение установившейся ошибки
постоянных значениях задающего
воздействия и возмущения достигается
увеличением передаточного коэффициента
разомкнутой системы. Однако с
увеличением статической точности в
большинстве случаев уменьшаются запасы
устойчивости I
и при значительном увеличении k
система
становится неустойчивой.
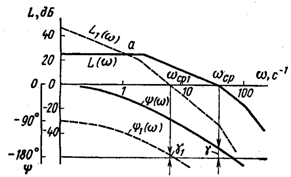
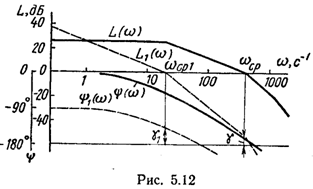
Противоречие
между статической точностью и
устойчивостью проиллюстрировано на
рис. 5.9, где сплошными линиями показаны
логарифмические частотные характеристики
разомкнутой системы с передаточной
функцией

при
![]()
Если
передаточный коэффициент увеличить
до k
— 60,
то ЛАЧХ принимает положение, показанное
пунктиром. Частота среза увеличилась
и запас устойчивости по фазе уменьшился
с
![]()
до
![]()
Столь
малый запас по фазе совершенно недопустим.
При
повышении статической точности путем
увеличения передаточного коэффициента
k
разомкнутой
системы необходимы мероприятия для
обеспечения достаточного запаса
устойчивости. Они будут рассмотрены
в следующем параграфе. Возможно,
вообще говоря, создание такой структуры
системы, которая допускает неограниченное
увеличение передаточного коэффициента
k
разомкнутой
цепи 121.
Другой
путь повышения статической точности
— обеспечение астатизма. В астатической
системе младшие коэффициенты ошибки
имеют следующие значения:

где
k0
—
передаточный коэффициент разомкнутой
системы называемый в данном случае
добротностью системы по скорости
(или коэффициентом добротности
по скорости). Таким образом, в астатической
системе отсутствует установившаяся
ошибка от постоянного задающего
воздействия и постоянных возмущений.
Для
астатизма относительно возмущения
интегрирующее звено должно быть введено
до точки, в которой приложено возмущение
(рис. 5.10).
Влияние
интегрирующего звена на динамические
свойства системы
где
сплошными линиями показаны
логарифмические частотные характеристики
системы с передаточной функцией
(5.26). При введении в разомкнутую цепь
этой системы интегрирующего звена
характеристики принимают положение,
показанное пунктиром. Фазочастотная
характеристика переместилась вниз
на —90°, а амплитудно-частотная
характеристика повернулась вокруг
точки а
по
направлению часовой стрелки . В
результате запас устойчивости по фазе
уменьшился с
![]()
до
недопустимо малого значения
![]()
Система
остается устойчивой, но переходный
процесс будет сильно колебательным.
Кроме того, уменьшилась частота среза
и переходные процессы будут более
продолжительными.
Однако
в других ситуациях введение интегрирующего
звена может не только не ухудшить, а
даже улучшить динамические свойства
системы. Пусть, например, постоянные
времени системы с передаточной функцией
(5.26) имеют следующие значения: Т1
=
= 0,05 с, Т2
=
0,0025 с и T3
= 0,001 с. Логарифмические частотные
характеристики разомкнутой системы
показаны
При
введении интегрирующего звена
характеристики принимают положение,
показанное пунктирными линиями. В
данном случае интегрирующее звено
уменьшило частоту среза, но запас
устойчивости по фазе увеличился с
![]()
|до
![]()
.
Хотя быстродействие системы
уменьшилось, но уменьшилась и
колебательность.
Таким
образом, при повышении статической
точности путем введения интегрирующего
звена могут оказаться необходимыми
мероприятия по сохранению запасов
устойчивости САУ.
Значительно
лучшие результаты получают при получении
астатизма с помощью изодромного звена,
т. е- звена с передаточной функцией
![]()
![]()
постоянная
времени изодрома.
Если
постоянная времени
![]()
достаточно
велика, то запас устойчивости может
быть сохранен неизменным. Уменьшение
передаточного коэффициента разомкнутой
системы должно быть скомпенсировано
увеличением коэффициента усиления
усилителя. Следует учитывать, что при
большом значении
могут
увеличиться старшие коэффициенты
ошибки.
Астатизм
САУ относительно задающего воздействия
можно обеспечить более простыми
способами: неединичной обратной
связью и масштабированием [3).
Структурная
схема системы с неединичной обратной
связью показана на рис. 5.13, а.
В
установившемся режиме регулируемая
координата связана с постоянным задающим
воздействием соотношением

(5.27)
где
kn
—
передаточный коэффициент прямой цепи
системы.
Если
выполнить основную обратную связь
системы с коэффициентом
![]()
и
система относительно задающего
воздействия будет астатической.Структурная
схема системы масштабированием входной
(величины показана на рис. 5.13, б.
Ее
особенность — наличие
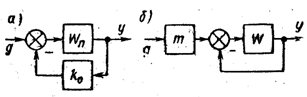
усилительного
звена с передаточным коэффициентом
m
на входе. В установившемся режиме
![]()
где
k
—
передаточный коэффициент разомкнутой
системы.
При
/л = 1 -f-
УЬ
получаем
у
= g0
и
система является астатической
относительно задающего воздействия.
Недостаток
этих способов в том, что астатизм
обеспечивается только при сохранении
указанных соотношений между передаточными
коэффициентами. Неточное определение
передаточного коэффициента какого-либо
элемента системы и его изменение в
процессе эксплуатации ведут к появлению
статической ошибки. Астатизм,
достигнутый введением интегрирующего
или изодромного звена, сохраняется и
при изменении параметров системы.
Однако нужно иметь в виду, что введение
двух интегрирующих звеньев в систему,
состоящую из усилительных, апериодических
и колебательных звеньев, сделает ее
структурно-неустойчивой. Возможно
обеспечение астатизма и более высокого
порядка. При этом из-за введения большого
числа интегрирующих или изодромных
звеньев и мероприятий, обеспечивающих
требуемые динамические свойства,
структура САУ значительно усложняется.
Компенсация
внешнего воздействия (обеспечение
инвариантности). Рассмотренные выше
способы улучшения статических и
динамических свойств системы связаны
лишь с изменениями параметров
элементов САУ и структуры ее отдельных
участков, но при этом не затрагивают
принципа действия системы.
Помимо
принципа регулирования по отклонению
существует принцип регулирования
по внешнему воздействию. Значительный
эффект дает их одновременное использование.
В этом случае системы называются
комбинированными. Кроме замкнутого
контура они имеют дополнительную
цепь влияния внешнего воздействия —
возмущения или задающего.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Определить установившуюся ошибку следящей
системы при воздействиях: 1) x(t)=20+2tи 2) x(t)=20+2t–0,5t2, если известна передаточная функция
 (18.1)
(18.1)
и заданы параметры: K=100 с–1; T1=0,1 c; T2=0,01
c.
Решение
Передаточную функцию Ke(p) преобразуем к виду
 . (18.2)
. (18.2)
Отсюда находим передаточную функцию разомкнутой системы
 (18.3)
(18.3)
Рассматриваемая система имеет первый порядок астатизма и добротность
K1=K=100 с–1. Следовательно, установившаяся
динамическая ошибка в первом случае равна
а во втором случае

Для нахождения коэффициента С2/2 используем уравнение (11.8)
(лекция 11), которое в данном случае принимает вид
 (18.4)
(18.4)
где
A(p)=T1T2p2+(T1+T2)p+1,
а B(p)=1.
Приравнивая
коэффициенты при p2
в обеих частях уравнения, находим
или
 .
.
Подставив значения параметров K, Т1
и Т2, получим С2/2=0,001.
Окончательно для ошибки имеем
![]()
Первая
составляющая (0,019) определяет скоростную ошибку, а вторая (–0,01t) – ошибку по ускорению. Как видим, вклад составляющей – С2/2=–0,001
действительно мал, и можно полагать, что ![]() .
.
Пример 19
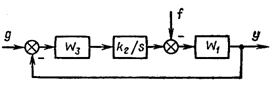
Провести оптимизацию системы (рис. 19.1)
по параметру kи при воздействии ![]() и помехе
и помехе ![]() – белом шуме с спектральной плотностью
– белом шуме с спектральной плотностью
N0 Bт /Гц.
Решение
Оптимизацию проводим в соответствии с критерием
(1.106), так как воздействие детерминированное.
Рис. 19.1
Используя результаты п.п. 1.5.2, 1.5.3, для среднего квадрата
ошибки (1.94) запишем
 (19.1)
(19.1)
Шумовая полоса системы в
соответствии с (1.98) равна

где
 (19.2)
(19.2)
– табличный интеграл вида (1.100), а полиномы
соответствуют
передаточной функции замкнутой системы Kз(p)=1/[1+p(1/K1)].
Подставив значения параметров a0=1/K1, a1=1
и b0=1 в (19.2), находим I1=K1/2.
Шумовая полоса
определяется добротностью системы по скорости K1=kдkи:
![]() (19.3)
(19.3)
Критерий оптимизации (1.106) в данном случае принимает
вид
 (19.4)
(19.4)
Решая уравнение (19.4), получаем
Оптимальное значение шумовой полосы и минимально достижимую ошибку
находим подстановкой ![]() в выражение для Fш (19.3) и
в выражение для Fш (19.3) и ![]() , (19.1):
, (19.1):
 (19.5)
(19.5)
Анализ выражения (19.5) показывает, что оптимальное значение полосы
системы определяется скоростью изменения воздействия ![]() и
и
интенсивностью шума N0
(уменьшается с ростом N0).
Пример
20
Для системы, рассмотренной в примере 19, провести оптимизацию по
параметру kи при условия, что воздействие х(t) – стационарный
случайный процесс с нулевым средним значением и спектральной плотностью
Sx(w)=
![]()
(помеха n(t),
как и ранее, белый шум со спектральной плотностью N0).
Решение
В качестве
критерия оптимальности используем выражение (1.107), которое принимает вид
 (20.1)
(20.1)
Дисперсию динамической ошибки находим из (12.10) (лекция 12) после
подстановки в него выражений для энергетического спектра воздействия и квадрата
АЧХ
Используя для Sx(w) представление в виде
Sx(w) = 
дисперсию
динамической ошибки выражаем через табличный интеграл:
![]()
 (20.2)
(20.2)
где
полиномы
A2(jw)=(jw)2+(a+K1)(jw)+aK1,
B2(w)=w2.
После
подстановки параметров a0=1, a1=a+K1, a2=aK1, b0=1 и b1=0 в
выражение (20.2), получаем
Дисперсия
динамической ошибки
С
учетом этого выражения после решения уравнения (20.1) относительно параметра kи опт имеем
 (20.3)
(20.3)
Значения оптимальной шумовой полосы и минимально достижимой ошибки
находим подстановкой k иопт в
соответствующие выражения для Fш опт и ![]() . Как видно из (20.3),
. Как видно из (20.3),
значение kиопт (а следовательно, Fшопт) определяется дисперсией ![]() и
и
шириной спектра a воздействия, а также интенсивностью шума N0.
Задача 40
Найти установившуюся ошибку в следящей системе (рис. 40.1),
полагая, что воздействие х(t) = 20+2t–0,5t2.

Рис.
40.1
Задача 41
Для системы с передаточной функцией
![]()
найти
статическую ошибку, ошибку по скорости и ошибку по ускорению.
Задача 42
Для систем, ЛАХ которых представлены на рис. 42.1, а, б,
в, г, найти установившуюся ошибку слежения при задающем воздействии x(t)=x0+![]() xt+0,5
xt+0,5![]() xt2.
xt2.
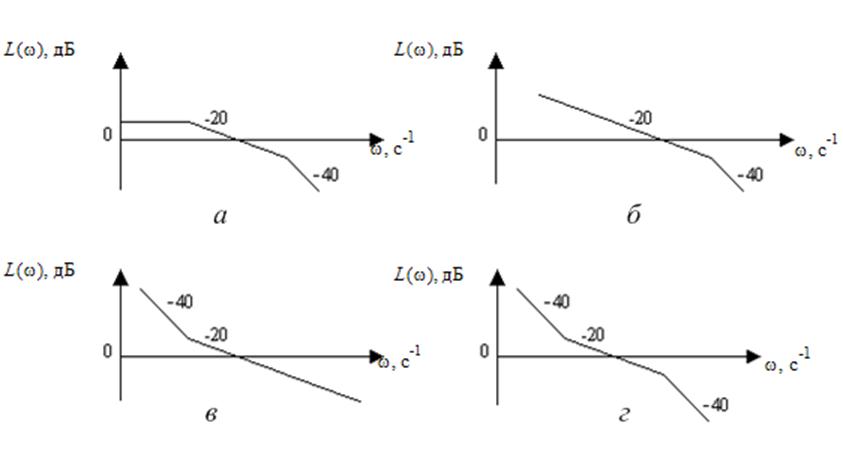
Рис.
42.1
Задача 43
Для замкнутой системы (рис. 43.1) найти шумовую
полосу, а также установившуюся ошибку при задающем воздействии х(t)
= 1+0,5t.
Рис.
43.1
Задача 44
Передаточная функция разомкнутой системы
![]()
![]()
Найти шумовую полосу замкнутой системы при условии, что запас устойчивости
по фазе Δφ = π/4 рад.
Задача 45
Передаточная функция разомкнутой системы
![]()
![]()
Найти шумовую полосу замкнутой системы при условии,
что скоростная ошибка слежения еск < 0,01% от скорости ![]() изменения параметра х.
изменения параметра х.
Задача 46
Для замкнутой системы (рис. 46.1) найти шумовую
полосу, а также установившуюся ошибку при задающем воздействии х(t)
= 20 – t.
Рис.
46.1
Задача 47
Для замкнутой системы (рис. 47.1) определить значение
параметра K0, при
котором обеспечивается заданная точность: дисперсия шумовой ошибки равна
квадрату установившейся статической ошибки. Задающее воздействие х(t)
= 10, а спектральная плотность белого шума N0 = 0,1 Гц –1.
Рис.
47.1
Задача 48
ЛАХ разомкнутой системы имеет вид (рис. 48.1).
 |
Рис.
48.1
Определить параметры системы, при которых шумовая
полоса замкнутой системы равна 1Гц, а запас устойчивости по фазе Δφ >
π/6 рад.
Задача 49
Провести оптимизацию системы (рис. 49.1) по параметру K,
используя критерий минимума среднего квадрата ошибки. Воздействие х(t) = x0, а помеха – белый шум с
энергетическим спектром N0 Гц
–1.
1. Понятие об
управлении. Управлением
называется любое действие, вносящее
желаемые изменения в процесс, подлежащий
управлению. Под процессом
понимается нечто, изменяющееся качественно
или количественно во времени. Процессы
протекают в объектах различного вида.
Объекты бывают технические, экономические,
биологические, человеческие коллективы
и т.д. Нас интересуют технические объекты
и технологические процессы, протекающие
в этих объектах.
Желаемое
изменение процесса, имеющего место в
объекте, определяется целью
управления.
Цели управления весьма разнообразны.
Объектом
управления
или управляемой
системой
называется техническое устройство,
выходные параметры которого необходимо
изменять по желаемому закону. Выходные
параметры объекта управления называются
выходными
величинами или управляемыми величинами.
Все внешние
воздействия, оказывающие влияние на
ход управляемого процесса, другими
словами, на объект управления, можно
разделить на полезные и «вредные».
Полезные внешние
воздействия, которые дают возможность
обеспечить протекание процесса в нужном
русле, называются управляющими
воздействиями.
Это контролируемые воздействия,
приложенные к объекту управления,
позволяет изменять ход процесса в
желаемом направлении. За их счет
реализуется цель управления.
Обычно другие
«вредные» внешние как контролируемые,
так и неконтролируемые воздействия,
изменяющие состояние объекта нежелательным
образом, называются возмущающими
воздействиями.
Почему происходят нежелательные
отклонения, причем неопределенные?
В случае корабля
положение руля и мощность сигналов,
поступающих на двигатели, являются
управляющими воздействиями. Их изменение
приводит к желаемым значениям некоторых
выходных сигналов, например курса и
скорости движения. Ветер, волны и течение
являются возмущающими воздействиями,
т.к. они стремятся нежелательным образом
повлиять на управляемые величины:
местоположение, курс и скорость корабля.
Кроме того, возмущения вызывают усиление
таких движений корабля как бортовая и
килевая качки, вертикальное перемещение.
В общем случае
связь между управляющими воздействиями,
возмущающими воздействиями, объектом
управления и управляемыми величинами
показана на рисунке ниже.
В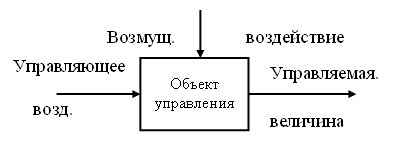
зависимости от способа формирования
управляющего воздействия различают:
1. Ручное
управление.
Осуществляется оператором, недостатки:
низкая точность, малое быстродействие.
2. Автоматизированное
управление.
Осуществляется оператором с помощью
ЦВМ. При этом оператор принимает решения,
анализируя результаты, получаемые от
ЦВМ, ЦВМ выступает как советник. Другое
название — супервизорное управление.
3. Автоматическое
управление.
Осуществляется техническими средствами
без непосредственного участия человека.
Самодействующее управление.
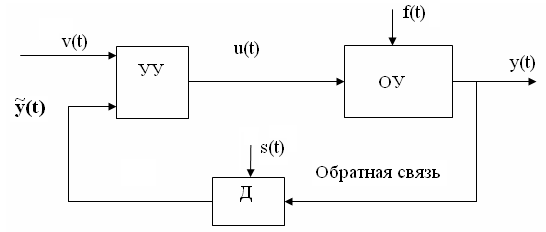
Техническое
устройство, с помощью которого
осуществляется автоматическое управление,
т.е. вырабатывается управляющее
воздействие, называется управляющим
устройством.
(УУ) или регулятором.
При автоматическом
управлении УУ соединяется с объектом
управления. Совокупность взаимосвязанных
между собой объекта управления (ОУ) и
управляющего устройства (УУ) называется
системой
автоматического управления (САУ).
Информация о цели
управления вводится в САУ с помощью
задающего
воздействия.

В общем случае все
эти воздействия и САУ связаны между
собой, как показано на рис. выше, и
являются векторными сигналами.
Пример.
Пусть объект
управления: помещение. Управляемая
величина: температура.
Нужно обеспечить
стабилизацию температуры, чтобы она
была постоянной. Возмущающие воздействия
– окружающая среда оказывает влияние
через окна и стены (температура горячей
воды, температура окружающего воздуха,
направление и скорость ветра).
-
Ручное управление.

Управляющее
воздействие – изменение расхода горячей
воды с помощью вентиля (управляющего
органа), степень открытия вентиля.
2. Автоматическое
управление.
Первое требование для управления
(регулирования) температурой в помещении
иметь устройство (датчик), которое
определяет или «чувствет» изменения
температуры. Второе требование – надо
иметь устройство (управляющее устройство),
которое изменяет подводимую в помещение
теплоту (тепловую энергию).
П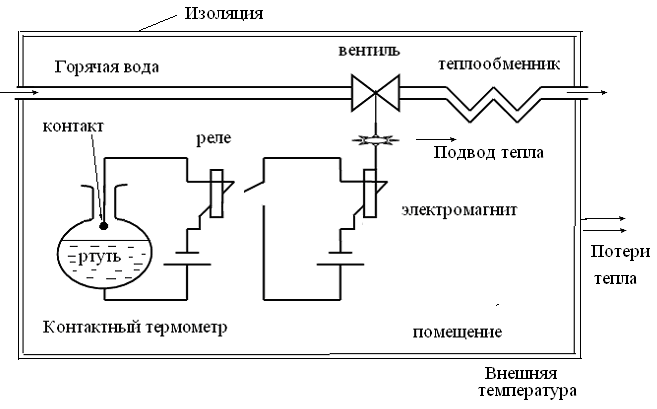
рерывистое
управление. Физическая реализация
системы автоматического регулирования
температуры показана на рис. ниже.
Система работает
следующим образом. Если температура в
помещении повысилась относительно
желаемого значения, столбик ртути в
термометре (датчике) поднимается,
достигает контакта, замыкается токовая
цепь, включается реле, затем срабатывает
электромагнит, вентиль закрывается,
отопление отключается. Через некоторое
время температура в помещении падает,
столбик ртути опускается, отключается
реле, вентиль открывается. Такая система
работает только на охлаждение температуры.
Вопрос №2.
Определение порядка астатизма по
передаточной функции разомкнутой
системы.
Рассмотрим замкнутую систему с единичной
обратной связью и с порядком астатизма,
равным ν, которая в разомкнутом
состоянии имеет передаточную функцию
![]()
.
Действительно, передаточная функция
по ошибке
![]()
,
где
![]()
.
Следовательно, коэффициент статической
ошибки согласно
![]()
будет равен:
![]()
Полагая ν≥1, разложим
![]()
в ряд Маклорена в окрестности точки
р=0:
![]()
Так как
![]()
,
то
![]()
![]()
![]()
Приравнивая коэффициенты при одинаковых
степенях р у двух последних выражений,
получаем
![]()
Следовательно, для системы с единичной
обратной связью, содержащей ν
интегрирующих звеньев, первые ν
коэффициентов ошибок обращаются в нуль,
т.е. такая система имеет ν-ый порядок
астатизма.
Определение астатической системы
порядка ν как системы, у которой
первые ν коэффициентов ошибок равны
нулю, является более общим, чем ее
определение как системы, имеющей ν
интегрирующих звеньев.
Ненулевые коэффициенты ошибок Сi
обязательно включают в себя в качестве
делителя коэффициент усиления системы.
Поэтому с увеличением коэффициента
усиления величина ненулевых коэффициентов
ошибок уменьшается.
Нужно отметить, что для системы с
единичной обратной связью основное
значение в вопросе обеспечения заданной
точности имеют коэффициент усиления и
порядок астатизма. Однако, стремление
увеличить коэффициент усиления и (или)
порядок астатизма может повлечь за
собой дестабилизацию системы.
Вопрос №3 Основные принципы управления.
Применяют два основных принципа
управления: один из них приводит к
разомкнутой системе, второй – к замкнутой
системе.
2. Замкнутые системы (системы с обратной
связью (ОС))
Остановимся на двух законах управления,
используемых в замкнутых системах.
а) Управление с прямой и обратной
связью.
Функциональная схема замкнутой системы:
В данной системе используется
информация о результатах управления.
Она заключена в ОС. Информацию содержит
![]()
.
Закон управления с прямой и обратной
связью:
![]()
.
Используется только информация прошлая
и текущая (в настоящий момент времени).
Замкнутые системы обладают более высоким
качеством и большей точностью, чем
разомкнутые, т.к.:
-
Уменьшает влияние неопределенности и
изменчивости свойств ОУ на управляемую
величину (обеспечивают робастность). -
Снижают эффект, обусловленный возмущающим
воздействием. -
Позволяют изменять реакцию системы на
задающее воздействие. -
Дают возможность управлять неустойчивыми
ОУ.
К недостаткам замкнутых систем следует
отнести проблемы, порождаемые обратной
связью, а именно, обеспечение устойчивости
(обратная связь может дестабилизировать
систему) и помехоустойчивости (возникает
проблема уменьшения влияния шума
измерения).
Управляющее устройство проектируется
так, чтобы обеспечить компромисс между
требованиями, предъявляемыми к
робастности, точности воспроизведения
задающего воздействия, виду реакции на
внешние воздействия, и устойчивостью
системы.
б) Принцип управления по ошибке (по
отклонению)
Этот принцип называют принципом
Ползунова-Уатта.
Пусть
![]()
и ошибка
![]()
.
Тогда закон управления по ошибке
имеет вид:
![]()
Функциональная схема системы, в которой
используется закон управления по ошибке:
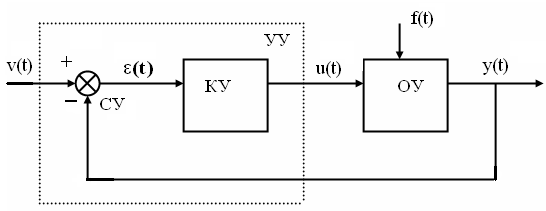
Управляющее устройство (УУ) состоит из
сравнивающего устройства (СУ), определяющего
ошибку управления, и корректирующего
устройства (КУ), вырабатывающего
управляющее воздействие.
Философия таких систем весьма прозрачна:
Независимо от причины возникновения
ошибки УУ система стремится свести эту
ошибку к нулю. В сущности управляющее
устройство работает, используя
лингвистические правила:
Если ошибка больше нуля, то управление
положительное, Если ошибка меньше нуля,
то управление отрицательное, Если ошибка
равна нулю, то управление равно нулю.
Пример. Электромеханическая следящая
система.
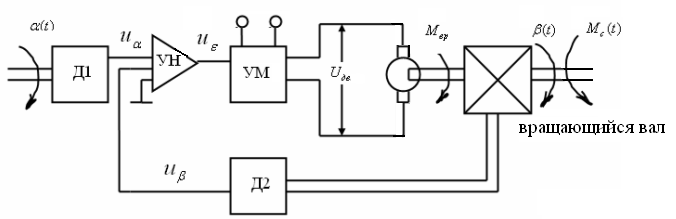
Здесь
![]()
(t)
— момент сопротивления,
![]()
(t)
— момент вращения.
Двигатель с вращающим валом является
ОУ. Цель управления состоит в обеспечении
примерного равенства углов поворота
задающей оси и следящего (вращающегося)
вала, т.е.
![]()
,
причем угол
![]()
изменяется случайным образом. С помощью
датчика Д1 в систему вводится информация
о цели управления. Задающий сигнал
![]()
,
где
![]()
— коэффициент пропорциональности. За
счет датчика Д2 система получает
информацию о результатах управления.
Его выходная величина![]()
пропорциональна управляемой величине
![]()
и является сигналом ОС.
Дифференциальный усилитель напряжения
(УН) служит для вычисления разности
напряжений
![]()
и
![]()
,
и ее последующего усиления, так что его
выход
![]()
.
С учетом выражений для
и
сигнал рассогласования![]()
оказывается пропорциональным отклонению
(ошибке, рассогласованию)![]()
.
К двигателю подводится управляющее
воздействие
![]()
,представляющее
собой преобразованный усилителем
мощности (УМ) сигнал рассогласования.
Как видим, управляющее воздействие
пропорционально ошибке. Следовательно,
в системе используется принцип управления
по ошибке.
Система работает следующим образом.
Если
![]()
>0,
то
![]()
>![]()
,
при этом сигнал рассогласования
![]()
>0,
усиленный УН и УМ, поступает на двигатель,
как
![]()
>0,
создается момент, ускоряющий вращение
вала в необходимую сторону, и вал начинает
«догонять» задающую ось; если ошибка
отрицательна
<0,
>
,
при этом
<0,
то
<0,
то к валу двигателя прикладывается
момент противоположного знака, и следящий
вал тормозится.
Для данной системы возмущающим
воздействием является момент сопротивления
(нагрузки) на валу двигателя.
В описанной простейшей системе
функции управляющего устройства сводятся
к вычитанию сигналов двух датчиков и
умножению разности (сигнала ошибки) на
постоянный коэффициент, равный
произведению коэффициентов усиления
усилителей напряжения и мощности. Как
мы убедимся в дальнейшем, для высокого
качества управления (малости ошибки)
приходится усложнять эти функции, вводя
в закон управления производные и
интегралы от ошибки.
Установившееся
значение ошибки воспроизведения в ряде
случаев определяется с помощью известной
в операционном исчислении теоремы о
конечном значении, которая применительно
к данному случаю может быть записана в
видеεуст=![]()
(8)
Преобразование
Лапласа ε(р) ошибки легко найти, если
известны преобразование Лапласа v(р)
входного сигнала и передаточная функция
для ошибки Фε(р),
связанная с передаточной функцией Ф(р)
замкнутой системы соотношением
Фε(р)=1-Ф(р) (9)Действительно,
согласно (4)ε(р)=Фε(р)v(p)(10)
Принимая
во внимание существующую связь между
передаточными функциями замкнутой Ф(р)
и разомкнутой W(р)
системФ(р)=W(p)/(1+W(p)),а
также, что![]()
,на
основании (9) имеемФε(р)=![]()
Передаточная
функция по ошибке называется также
функцией чувствительности.
Следовательно,![]()
(11)
Учитывая,
что W0(p)
обладает свойством W0(0)=1
получаем![]()
(12)
Выражение
(12) имеет смысл, если ε(t)
стремится к определенному пределу при
t→∞.
В противном случае выражение (8)
неприменимо. Рассмотрим от каких факторов
зависит ошибка εуст
при типовых входных сигналах, для которых
вышеуказанное требование соблюдается.
Входной
сигнал – ступенчатая функция v(t)=a01(t).
Операторное
выражение такой функции v(p)=a0/p.
При этом
![]()
(13)
Если
ν=0 (система не содержит интегрирующих
звеньев), то
![]()
(14)
Следовательно,
в такой системе, даже при постоянном
входном сигнале, имеет место ошибка,
называемая ошибкой по положению или
статической ошибкой. Ошибка
![]()
при известном а0
определяется статизмом системы ![]()
(15)
и
она тем меньше, чем больше коэффициент
усиления k.
Системы,
обладающие статической ошибкой,
называются статическими системами.
Коэффициент усиления k
статических систем является безразмерной
величиной, так как величины а0
и εуст
имеют одинаковую размерность.
Отметим,
что статическая ошибка, определяемая
выражением (14), является принципиальной
(методической) ошибкой и обусловлена
принципом действия системы.
Если
ν>1 (система содержит одно или несколько
интегрирующих звеньев), то, как это видно
из выражения (13), статическая ошибка
равна нулю. Системы, обладающие нулевой
статической ошибкой, называются
астатическими системами. При этом
величина ν, как говорят, определяет
порядок астатизма системы.
Астатическую
систему можно рассматривать как
статическую систему с бесконечно большим
коэффициентом усиления k.
Действительно, наличие интегрирующих
звеньев приводит к тому, что при постоянном
входе сигнал на выходе разомкнутой
системы с течением времени растет до
бесконечности.
Входной
сигнал v(t)=a1t,
изменяющийся с постоянной скоростью
a1.
В
этом случае v(p)=a1/p2,
а установившаяся ошибка
![]()
(16)
Если
ν=0 (статическая система), то εуст=∞.
Полученному результату легко дать
объяснение, если учесть, что в установившемся
режиме, т.е. при t→∞,
на входе системы имеется бесконечно
большой сигнал и поэтому при конечном
коэффициенте усиления k,
согласно (14), ошибка εуст
равна бесконечности. Другими словами,
данный случай можно рассматривать как
предыдущий при v(t)=a0,
если положить a0=∞.
Если
ν=1 (система с астатизмом первого порядка),
то
![]()
(17)
При
этом ошибка εуст
обратно пропорциональна коэффициенту
усиления и носит название скоростной
ошибки. Так как входной сигнал v
и ошибка ε имеют одинаковую размерность,
то коэффициент усиления системы с
астатизмом первого порядка имеет
размерность [сек-1]
и характеризует установившуюся скорость
изменения выходной величины разомкнутой
системы при постоянном входном сигнале.
Физический
смысл полученного результата виден на
примере простейшей следящей системы
(рис. 1). Если на входе имеем сигнал v,
изменяющийся с постоянной линейной
скоростью a1,
то установившийся режим будет иметь
место лишь в случае, когда выходная
величина у будет изменяться с той же
скоростью а1.
Р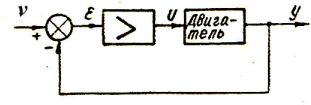
ис.
1
Но
для этого необходимо подвести к двигателю
определенное напряжение U=a1/Kдв,
зависящее от коэффициента усиления
двигателя Кдв.
Это напряжение может появиться только
при наличии сигнала ошибки εуст.
Чем больше коэффициент усиления усилителя
Кус,
а следовательно, и всей системы –
К=КусКдв,
тем меньшее значение εуст=а1/Кус
требуется для вращения двигателя со
скоростью, равной скорости изменения
входного сигнала.
Используя
выражение (17), по заданным значениям
скорости а10
и скоростной ошибки (εск)доп
можно найти величину коэффициента
усиления
![]()
(18)обеспечивающую
требуемую точность воспроизведения
сигнала v(t)=a10t.
Если
ν≥2 (система с порядком астатизма выше
первого), то скоростная ошибка равна
нулю.
Входной
сигнал
![]()
,
изменяющийся с постоянным ускорением
а2.
Так
как
![]()
,
то ошибка с учетом (12)
![]()
(19)
Если
ν=0, 1, то установившаяся ошибка равна
бесконечности. Если ν=2 (система с
астатизмом второго порядка), то ошибка
определяется выражением
![]()
(20)
и
носит название ошибки по ускорению. Как
видно их этого выражения, коэффициент
усиления системы с астатизмом второго
порядка имеет размерность [сек-2].
Если
ν≥3, то установившаяся ошибка равна
нулю.
Таким
образом, точность работы САУ при входных
сигналах вида степенной функции
![]()
(20а)
зависит только от порядка астатизма ν
и коэффициента усиления k
системы, причем, чем больше значения ν
и k,
тем меньше величина ошибки воспроизведения.
Формулу
(12) для определения ошибки εуст
удобно использовать, если входное
воздействие представляет собой степенную
функцию вида (20а). Однако на практике
часто встречаются входные сигналы,
которые меняются достаточно медленно
по известному, а порой и неизвестному,
законам. Обычно такие сигналы на некотором
текущем интервале времени можно
представить в виде ряда Тейлора. В этом
случае удобно ввести понятие о
коэффициентах ошибок, с помощью которых
нетрудно найти установившуюся ошибку
воспроизведения.
Определение динамических ошибок (по
скорости, по ускорению) для статической и астатических систем.
Точность АС
характеризуется величиной ошибки в установившемся режиме и зависит от характера
воздействия, а также структуры и параметров системы.
Реальные воздействия
в радиотехнических следящих системах описывается сложными (случайными)
функциями времени. Однако при анализе точности управления часто используют
простые детерминированные воздействия: постоянное ступенчатое, линейное,
квадратичное и другие. Это позволяет упростить анализ и в то же время сохранить
в модели задающего воздействия наиболее существенные признаки (начальное
значение, скорость изменения, ускорение). Большинство систем радиоавтоматики
описываются передаточными функциями вида
 , (11.1)
, (11.1)
где Ki — общее усиление
разомкнутой системы, i – число интегрирующих
звеньев, определяющее порядок астатизма системы;
– полиномы, порядок которых определяется числом типовых
звеньев (n и m соответственно инерционных и форсирующих), а
коэффициенты полиномов – постоянными времени типовых звеньев.
11.1. Статические ошибки
Ошибка системы при постоянном
(ступенчатом) воздействии x(t)=x0=const при t³0
называется статическойeст.
Для установившейся
ошибки, учитывая, что изображение X(p)=x0/p,
запишем:
 . (11.2)
. (11.2)
Для статической
системы (не содержащей интегрирующих звеньев) статическая ошибка равна
 . (11.3)
. (11.3)
Таким образом, в
статических системах установившееся значение управляемой переменной не равно
заданному: меньше на величину ошибки, значение которой обратно пропорционально
усилению К0 по постоянному току (обычно К0>>1).
Для астатических
систем (i ³ 1) ошибка при постоянном воздействии
![]() ,
,
так как числитель в (11.2) равен нулю, а знаменатель равен
Кi.
Отсутствие
статической ошибки обусловило название таких систем – астатические.
11.2. Динамические ошибки
Ошибка,
характеризующая точность замкнутой системы при меняющемся воздействии,
называется динамической eд(t).
Любое детерминированное
воздействие (при условии существования его производных d(k)/dt(k),
k=1, 2, …) можно представить в виде ряда
 , (11.4)
, (11.4)
где x0 — начальное значение, ![]() — скорость изменения,
— скорость изменения, ![]() — ускорение и т. д.
— ускорение и т. д.
Для вычисления
динамических ошибок при типовых воздействиях (линейном и квадратическом)
представим выражение для ошибки в операторной форме:
![]() (11.5)
(11.5)
Используя разложение
передаточной функции Ke(p) в ряд Маклорена по степеням
переменной р, перепишем (11.5) в виде
 (11.6)
(11.6)
где C0, C1, C2,
… — коэффициенты ошибок, определяемые
как
 (11.7)
(11.7)
Установившееся
значение ошибки при произвольном воздействии x(t)
на основании (11.6) определяется временным рядом
 (11.8)
(11.8)
Чем меньше
коэффициенты ошибок, тем выше точность системы при произвольном
детерминированном воздействии. При вычислении коэффициентов Ck
обычно ограничиваются только первыми тремя (для систем с астатизмом не выше
второго порядка).
Коэффициент C0
в соответствии с (11.7) равен
 .
.
Для статических
систем (i=0) C0=1/(1+K0), а для
астатических систем C0=0.
Определим динамические
ошибки типовых систем при линейном воздействии (изменение с постоянной
скоростью) x(t)=nxt.
В соответствии с
формулой (11.8) динамическая ошибка (ошибка по скорости) определяется как
![]() .
.
Для статической
системы она равна
так как вклад составляющей C1nx
значительно меньше, чем C0 x(t), которая растет
линейно со временем. Таким образом, скоростная ошибка в статических системах
накапливается со временем со скоростью nx/(1+K0), что делает неприемлемым использование
таких систем при меняющемся воздействии. Для астатических систем C0=0 и скоростная ошибка
![]() .
.
Нахождение
коэффициента ошибки C1 с использованием формулы (11.7)
затруднительно. Более простой способ его вычисления основан на сравнении
точного выражения для передаточной функции Ke(p) и
аппроксимирующего ее ряда:
 (11.9)
(11.9)
Уравнение (11.9)
можно представить в виде
 (11.10)
(11.10)
Полагая i= 1 (астатическая система первого порядка) и приравнивая
коэффициенты при переменной p в левой и правой частях уравнения, находим
![]()
или C1=1/K1, так как C0=0.
Таким образом,
скоростная ошибка системы первого порядка астатизма eд=nx/K1
определяется усилением разомкнутой системы K1 и не зависит от
времени. Параметр K1, имеющий размерность c –1,
называется добротностью системы по скорости (чем выше добротность, тем
точнее система).
Для астатической
системы второго порядка скоростная ошибка равна нулю, так как оба коэффициента C0=C1=0.
Равенство C1=0 вытекает из уравнения (11.10), так как в
правой части уравнения не содержится слагаемого, в которое входит переменная p
(есть только с p2 и выше).
Оценим динамические
ошибки типовых систем при квадратичном воздействии (изменение с постоянным
ускорением)![]() .
.
В соответствии с (11.8)
для динамической ошибки (ошибки по ускорению) запишем
 . (11.11)
. (11.11)
Для статической
системы ошибка по ускорению равна
 (11.12)
(11.12)
так как составляющие ошибки с коэффициентами C1 и C2
вносят пренебрежимо малый вклад в результирующую ошибку. Накопление ошибки по
квадратичному закону исключает применение статических систем при наличии
ускорения.
Для системы первого
порядка астатизма ошибка по ускорению равна
 (11.13)
(11.13)
(вкладом составляющей ![]() можно
можно
пренебречь). Накопление ошибки со временем (со скоростью ![]() ) не позволяет применять такие
) не позволяет применять такие
системы при наличии ускорения. Для астатической системы второго порядка ошибка
по ускорению равна
 . (11.14)
. (11.14)
Определение
коэффициента ошибки C2 с использованием уравнения (11.7)
сводится к приравниванию коэффициентов при p2 в обеих частях
уравнения:
 . (11.15)
. (11.15)
Откуда
C2/2=1/K2, так как C0=C1=0.
§ 19.1. Статические и скоростные ошибки автоколебательных систем
В предыдущих главах исследовались симметричные автоколебания как результат свободного движения системы (т. е. без внешнего воздействия) при симметричных нелинейностях. Однако, как будет показано, важное практическое значение имеет также рассмотрение несимметричных автоколебаний.
Несимметрия автоколебаний может вызываться различными причинами;
1) несимметричностью нелинейной характеристики как при наличии, так и при отсутствии внешних воздействий;
2) наличием постоянного или медленно меняющегося внешнего воздействия при симметричных нелинейностях;
3) наличием постоянной или медленно меняющейся скорости изменения внешнего воздействия при симметричных нелинейностях (для тех случаев, когда постоянное воздействие не вызывает смещения центра колебаний; обычно это имеет место в следящих системах и вообще в астатических системах).
В самом деле, если имеется несимметричная нелинейная характеристика (например, рис. 19.1, а, б), то даже при симметричных колебаниях переменной  возникают несимметричные по амплитуде колебания переменной
возникают несимметричные по амплитуде колебания переменной  (рис. 19.1, б).
(рис. 19.1, б).

Рис. 19.1.
Если же нелинейность симметрична (например, рис. 19.2, а, б), то при наличии постоянного внешнего воздействия (или в астатических системах при наличии постоянной скорости изменения внешнего
воздействия) смещается центр колебаний переменной  вследствие чего колебания переменной
вследствие чего колебания переменной  становятся несимметричными по амплитуде и по времени (рис. 19.2, а) или только по времени (рис. 19.2, б).
становятся несимметричными по амплитуде и по времени (рис. 19.2, а) или только по времени (рис. 19.2, б).

Рис. 19.2.
Пусть задана автоматическая система, динамика которой описывается уравнением

В данном параграфе будем считать  для статических систем или же
для статических систем или же  для астатических систем. Астатической системой называется такая, в которой многочлен
для астатических систем. Астатической системой называется такая, в которой многочлен  имеет общий множитель
имеет общий множитель  , т. е.
, т. е.  .
.
Поэтому запишем уравнение (19.1) в виде

где соответственно

При этом решение нелинейного уравнения (19.1), в отличие от прежнего (§ 18.2), ищется в форме

причем  а,
а,  являются неизвестными постоянными.
являются неизвестными постоянными.
С учетом величины смещения  первые члены разложения в ряд Фурье вместо (18.6) и (18.7) следует записать в виде
первые члены разложения в ряд Фурье вместо (18.6) и (18.7) следует записать в виде

где при обозначении 

Отсюда видно, что в общем случае все три коэффициента являются функциями трех неизвестных:

В частных случаях эти зависимости могут быть более простыми.
Подстановка выражений (19.4) и (19.5) в заданное дифференциальное уравнение (19.1) с учетом свойства фильтра (см. § 18.2) дает

Это уравнение разбивается на два:

При таком разделении сохраняются существенно нелинейные свойства и отсутствие суперпозиции решений, так как остается нелинейная взаимосвязь обоих уравнений через соотношения (19.7).
Можно предложить два метода решения задачи.
Первый метод состоит в следующем. Уравнение (19.9) совпадает с прежним уравнением (18.33); отличие состоит лишь в том, что теперь коэффициенты q и  согласно (19.7) зависят не только от а и
согласно (19.7) зависят не только от а и  , но и от смещения
, но и от смещения  Поэтому, написав как прежде, характеристическое уравнение
Поэтому, написав как прежде, характеристическое уравнение

заменив  на
на  ивыделив вещественную и мнимую части, в отличие от (18.36), получим здесь два алгебраических уравнения с тремя неизвестными:
ивыделив вещественную и мнимую части, в отличие от (18.36), получим здесь два алгебраических уравнения с тремя неизвестными:

Эти уравнения дают возможность определить амплитуду  и частоту
и частоту  автоколебаний как функции постоянной составляющей
автоколебаний как функции постоянной составляющей 

Для решения этой задачи можно применять любой из способов, описанных в § 18.2, в зависимости от того, какой из них лучше подходит к условиям заданной конкретной задачи. Таким же способом можно определить зависимость а и  не только от
не только от  но и от параметров системы с целью выбора последних. Что касается тех способов § 18.2, где используются графики
но и от параметров системы с целью выбора последних. Что касается тех способов § 18.2, где используются графики  и
и  , то здесь их необходимо строить в виде серии кривых при разных постоянных значениях
, то здесь их необходимо строить в виде серии кривых при разных постоянных значениях  (рис. 19.3).
(рис. 19.3).
После того как из уравнений (19.11) определены зависимости (19.12), можно, воспользовавшись первым из выражений (19.7), найти функцию смещения

Подставив ее в (19.8), получим алгебраическое уравнение

с одной неизвестной  которая отсюда и определяется. Чаще всего это уравнение относительно
которая отсюда и определяется. Чаще всего это уравнение относительно  является трансцендентным и решается графически. Затем согласно (19.12) определяются также амплитуда
является трансцендентным и решается графически. Затем согласно (19.12) определяются также амплитуда  и частота
и частота 
Указанную зависимость (19.12) амплитуды и частоты автоколебаний от величины смещения центра колебаний, характерную именно для нелинейных систем (в линейных системах смещение центра колебаний не играет роли), надо всегда иметь в виду.

Рис. 19.3.
При одних нелинейностях она может быть весьма существенной, при других — менее существенной.
Второй метод решения той же задачи состоит, наоборот, в том, что сначала решается уравнение (19.8), где согласно (19.7) будет  или часто
или часто  . Решение получает вид
. Решение получает вид

Это решение подставляется затем в уравнения (19.11), которые, таким образом, буду! содержать только две неизвестные:  Определив последние (по любому из способов § 18.2), вычисляем потом по (19.15) и величину
Определив последние (по любому из способов § 18.2), вычисляем потом по (19.15) и величину  которая будет в результате зависеть от формы нелинейности, от параметров системы и от внешнего воздействия
которая будет в результате зависеть от формы нелинейности, от параметров системы и от внешнего воздействия 
Величина  и является искомой статической или скоростной ошибкои соответственно для статической и астатической систем.
и является искомой статической или скоростной ошибкои соответственно для статической и астатической систем.
В тех случаях, когда передаточная функция линейной части системы  имеет нулевой корень в знаменателе (что часто бывает), т. е. когда
имеет нулевой корень в знаменателе (что часто бывает), т. е. когда  вместо (19.14) получаем уравнение
вместо (19.14) получаем уравнение

откуда определяется статическое отклонение или скоростная ошибка 
В случае, когда при отсутствии внешнего воздействия  определяются автоколебания в системе с несимметричной нелинейностью, т. е. нелинейностью
определяются автоколебания в системе с несимметричной нелинейностью, т. е. нелинейностью  или же
или же  для которой
для которой

вместо уравнения (19.8) получаем

Оно решается любым из тех же двух методов, описанных выше для уравнения (19.8). Одновременно согласно (19.11) определяются 
Если в этом случае знаменатель  передаточной функции линейной части системы имеет нулевой корень, то
передаточной функции линейной части системы имеет нулевой корень, то  и, следовательно, уравнение (19.18) с учетом (19.13) принимает вид
и, следовательно, уравнение (19.18) с учетом (19.13) принимает вид

откуда определяется  Это означает, что в указанных системах возникает такое смещение
Это означает, что в указанных системах возникает такое смещение  колебаний переменной х, которое ликвидирует свойственную данной нелинейности несимметрию колебаний переменной F (т. е. обеспечивается
колебаний переменной х, которое ликвидирует свойственную данной нелинейности несимметрию колебаний переменной F (т. е. обеспечивается  ), как показано, например, на рис. 19.4 в отличие от рис. 19.1, б.
), как показано, например, на рис. 19.4 в отличие от рис. 19.1, б.
Приведем пример исследования совместного влияния двух внешних воздействий, причем из дальнейшего будет видно, что, в отличие от линейных систем, здесь нельзя просто складывать статические ошибки от отдельно взятых в  ействий.
ействий.
Уравнения автоматической системы (рис. 19.5) заданы в виде

где  — простейшая симметричная релейная характеристика, показанная на рис. 19.5:
— простейшая симметричная релейная характеристика, показанная на рис. 19.5:

Чтобы воспользоваться выведенными выше общими формулами, надо сначала привести заданную систему уравнений (19.20) — (19.22) к одному уравнению типа (19.1).

Рис. 19.4.

Рис. 19.5.
В результате получаем

Пусть  является задающим воздействием, изменяющимся с постоянной скоростью:
является задающим воздействием, изменяющимся с постоянной скоростью:

которое требуется воспроизвести на выходе системы в виде  Допустим также, что второе внешнее воздействие
Допустим также, что второе внешнее воздействие  является возмущающим и имеет постоянную величину (например, постоянная нагрузка на выходном валу системы):
является возмущающим и имеет постоянную величину (например, постоянная нагрузка на выходном валу системы):

Его влияние требуется свести к минимуму. Найдем установившуюся ошибку на выходе системы. Правая часть уравнения (19.24) будет при этом постоянной, и установившееся решение для х с учетом автоколебаний следует искать
в виде

Гармоническая линеаризация нелинейности (19.23) при этом согласно (19.6) дает

В данной задаче согласно (19.24) уравнение (19.9) для периодических составляющих получит вид

а уравнение (19.8) для постоянных составляющих будет

где согласно (19 24)-(19.26)

Выше были указаны два метода решения задачи. Для иллюстрации обоих методов решим данную задачу каждым из них.
Согласно первому методу сначала решается уравнение (19.29) для определения зависимостей 
Характеристическое уравнение здесь будет

и уравнения (19.11) поэтому примут вид

Исключая отсюда  находим частоту автоколебаний
находим частоту автоколебаний

Частота  в данной задаче оказалась не зависящей от смещения
в данной задаче оказалась не зависящей от смещения  , а следовательно, и от величины внешнего воздействия. Затем, подставляя в первое из уравнений (19.33) выражение q из (19.28) и
, а следовательно, и от величины внешнего воздействия. Затем, подставляя в первое из уравнений (19.33) выражение q из (19.28) и  из (19.34), получаем биквадратное уравнение для отыскания зависимости амплитуды автоколебаний
из (19.34), получаем биквадратное уравнение для отыскания зависимости амплитуды автоколебаний  от смещения
от смещения 

где величина

представляет собой амплитуду автоколебаний в данной системе при отсутствии смещения (при  ). Отсюда
). Отсюда

Полученное выражение мояшо записать также в виде

если обозначить

Результат (19.37) или (19.38) и представляет собой искомую зависимость 
Далее, согласно первому методу решения задачи подставим полученное значение амплитуды  из (19.38) в выражение (19.28) для
из (19.38) в выражение (19.28) для  откуда с использованием (19.39) найдем функцию смещения
откуда с использованием (19.39) найдем функцию смещения

где А определяется через параметры системы формулой (19.36).
Подставив величину (19.40) в уравнение (19.30) для постоянных составляющих, с учетом (19.31) и (19.36) получим

Сравнивая это с формулой (19.39), видим, что для искусственно введенной ранее величины а можно записать следующее выражение:

Эта величина характеризует совокупность приложенных к системе внешних воздействий. Учитывая это, из формулы (19.38) находим амплитуду автоколебаний

Существенно то, что амплитуда автоколебаний зависит не только от параметров системы (см. (19.36)), но еще и от величины внешних воздействий. Эта зависимость нелинейная. В данном случае при увеличении внешних воздействий амплитуда уменьшается по закону косинуса, в то время как частота не зависит от внешних воздействий.
Из формулы (19.43) видно, что автоколебания существуют до тех пор, пока величины внешних воздействий удовлетворяют условию

При этом амплитуда автоколебаний изменяется в пределах 
Таков первый метод определения установившихся величин смещения  амплитуды
амплитуды  и частоты
и частоты  автоколебаний при наличии внешних воздействий.
автоколебаний при наличии внешних воздействий.
Проиллюстрируем также и второй метод. Согласно второму методу сначала решается уравнение (19.30). По (19.30) и первой из формул (19.28) находим

или, с учетом (19.31),

Для отыскания входящей сюда амплитуды а воспользуемся уравнением (19.29). Характеристическое уравнение для него будет (19.32), и уравнения (19.11) поэтому примут вид:

где согласно (19.28) и (19.45)

Исключая из уравнений (19.46) величину  находим частоту автоколебаний
находим частоту автоколебаний

Подставив найденные выражения q в первое из уравнений (19.46), найдем амплитуду автоколебаний

где величина

является амплитудой автоколебаний при отсутствии внешних воздействий (при 
Подставив найденное выражение амплитуды (19.49) в формулу (19.45) получим окончательно величину смещения

Как видно, второй метод в данной задаче приводит к тем же самым результатам значительно более коротким путем, чем первый, что очень важно для практических расчетов (принципиально же оба метода эквивалентны друг другу). По-видимому, большая простота второго метода будет иметь место и в большинстве других задач.
В этом втором методе, в отличие от первого, функция смещения  не определяется. Однако последняя может понадобиться в дальнейшем для других целей. Но ее тоже легко можно определить при использовании второго метода. Здесь величины
не определяется. Однако последняя может понадобиться в дальнейшем для других целей. Но ее тоже легко можно определить при использовании второго метода. Здесь величины  и их отношение выражены через величины внешних воздействий. Функция же смещения
и их отношение выражены через величины внешних воздействий. Функция же смещения  не должна содержать ни величин внешних воздействий, ни амплитуды
не должна содержать ни величин внешних воздействий, ни амплитуды  зависящей от них. Подставив значение квадратной скобки из (19.51) в (19.45), получим
зависящей от них. Подставив значение квадратной скобки из (19.51) в (19.45), получим

а подставив это в первую из формул (19.28), сразу получим искомую функцию смещения

где А выражается только через параметры системы согласно (19.50).
Важно отметить, что функция смещения  не зависит ни от числа внешних воздействий, ни от характера их изменения (если они постоянные или медленно меняющиеся), что наиболее наглядно было видно из первого метода решения задачи.
не зависит ни от числа внешних воздействий, ни от характера их изменения (если они постоянные или медленно меняющиеся), что наиболее наглядно было видно из первого метода решения задачи.
Итак, двумя разными методами определена величина смещения  автоколебаний на входе реле. Найдем теперь установившуюся ошибку на выходе системы
автоколебаний на входе реле. Найдем теперь установившуюся ошибку на выходе системы  Поскольку на выходе должно воспроизводиться внешнее воздействие
Поскольку на выходе должно воспроизводиться внешнее воздействие  то согласно рис. 19.5 и второму уравнению (19.20) ошибка данной системы выражается величиной
то согласно рис. 19.5 и второму уравнению (19.20) ошибка данной системы выражается величиной  установившееся решение для которой, следовательно, и надо искать. Выразив переменную
установившееся решение для которой, следовательно, и надо искать. Выразив переменную  через х, которая уже известна, из заданных уравнений системы (19.20) и (19.21) получаем
через х, которая уже известна, из заданных уравнений системы (19.20) и (19.21) получаем

Учитывая (19.25) и (19.27), перепишем данное уравнение в виде

В соответствии с видом правой части установившееся решение этого линейного уравнения следует искать в виде

где  — постоянные, а
— постоянные, а  — периодическая составляющая.
— периодическая составляющая.
Подставив это в (19.54), получим три уравнения для отыскания указанных величин:

Второе из них дает

Тогда из (19.56) находим

где  определяется формулой (19.51) через внешние воздействия. Наконец, из уравнения (19.58) получаем амплитуду автоколебаний переменной
определяется формулой (19.51) через внешние воздействия. Наконец, из уравнения (19.58) получаем амплитуду автоколебаний переменной 

где  определяется формулой (19.49) через внешнее воздействие, а
определяется формулой (19.49) через внешнее воздействие, а  — формулой (19.48).
— формулой (19.48).
Итак, в данной системе имеются все три составляющие ошибки (19.55), зависящие от величины внешних воздействий и от параметров системы. Наиболее нежелательной из них является составляющая  возрастающая пропорционально времени. Поэтому систему необходимо видоизменить в первую очередь так, чтобы уничтожить эту составляющую ошибки, т. е. сделать
возрастающая пропорционально времени. Поэтому систему необходимо видоизменить в первую очередь так, чтобы уничтожить эту составляющую ошибки, т. е. сделать  Для этого можно было бы вовсе изъять дополнительную обратную связь (рис. 19.5), так как при кос
Для этого можно было бы вовсе изъять дополнительную обратную связь (рис. 19.5), так как при кос  согласно (19.59) будет
согласно (19.59) будет  Однако при этом существенно возрастает амплитуда автоколебаний (19.61), т. е. периодическая составляющая ошибки. Поэтому более целесообразной мерой будет замена жесткой обратной связи
Однако при этом существенно возрастает амплитуда автоколебаний (19.61), т. е. периодическая составляющая ошибки. Поэтому более целесообразной мерой будет замена жесткой обратной связи  на гибкую
на гибкую  . Тогда в уравнении (19.54) величина
. Тогда в уравнении (19.54) величина  заменится на
заменится на  :
:

Как видим, составляющая, пропорциональная времени, в правой части уравнения исчезла, вследствие чего установившееся решение для ошибки х в отличие от (19.55), будет

При этом из (19.62) находимз

причем изменяются, конечно, и формулы для  (их можно получить таким же способом). Подбором параметров системы амплитуду автоколебаний ошибки
(их можно получить таким же способом). Подбором параметров системы амплитуду автоколебаний ошибки  можно сделать весьма малой.
можно сделать весьма малой.