характеристике Переходный
режим вызван тем, что система инерционна
и должна некоторое время приспосабливаться
к поступающим на нее воздействиям. В
этих условиях оценку качества удобно
вести при наиболее тяжелом с точки
зрения воспроизведения системой
воздействии, таком, как ступенчатая
функция А*l(t).
Реакция системы на единичную ступенчатую
функцию является переходным процессом h(t),
по форме которого в простейшем случае
и можно судить о качестве переходного
режима.
На рис.
52.
изображены переходные характеристики
колебательного и монотонного типов,
оценка которых проводится с помощью
локальных критериев, называемых
показателями качества переходной
характеристики.
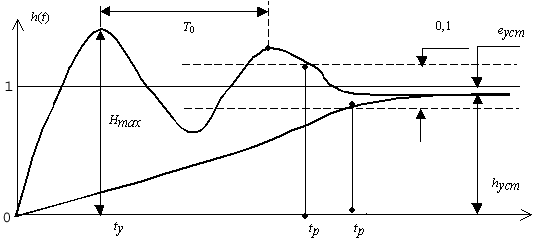
Рис.
52. Показатели качества переходной
характеристики
Для
характеристик колебательного типа
обычно используются следующие
показатели: Hm —
перерегулирование, которое определяет
относительное максимальное отклонение;
время установления tу —
момент достижения первого максимума;
время регулирования tр,
которое определяет длительность процесса
по уровню + 0,05 относительно установившегося
значения; период колебаний T.
Для
монотонных характеристик наиболее
употребительным является показатель
длительности переходного процесса tр. В
общем случае точное построение переходных
характеристик и, следовательно,
определение качества затруднительно.
Существует ряд методов, позволяющих
приближенно строить переходные
характеристики, однако эти методы сложны
и приводят к громоздким вычислительным
работам. Найти точные значения указанных
выше величин удается только для простейших
систем первого и второго порядков. Для
более сложных следящих систем существуют
приближенные формулы их нахождения.
В
основе формул лежит знание двух
параметров: частоты среза разомкнутой
следящей системы w с
и запаса по фазе. Эти параметры могут
быть найдены аналитически или по
логарифмическим частотным характеристикам.
Сводка вычислительных соотношений
приводится в табл.
П. 2.
2.2.3. Интегральный квадратичный критерий качества переходного режима
Локальные
критерии качества обычно наглядны, но
трудно вычисляются аналитически.
Примером тому служат показатели
переходной характеристики, рассмотренные
выше. Интегральные критерии, особенно
квадратичные, достаточно легко
вычисляются, однако не так наглядны,
как локальные. Обратимся к рис.53,
на котором изображены два монотонных
переходных процесса. Процесс 1 наименьшей
длительности. Об этом может свидетельствовать
такой косвенный фактор, как площадь
между кривой h(t)
и уровнем установившегося значения
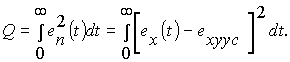
выходного процесса. Отсюда для оценки
качества можно ввести критерий
![]()

где
через eп (t)
обозначена ошибка переходного режима,
представляющая разность между текущим
и установившемся значениями переходной
характеристики. Чем меньше Q, тем выше
качество САУ.
Причем
подынтегральная квадратичная функция
потерь eп(t)
будет неотрицательной как для монотонных,
так и для колебательных процессов.
Очевидно,
что описанные критерии можно использовать
не только для случая переходной
характеристики, но и при произвольных
воздействиях.

Рис.53.
Сравнение качества переходных
характеристик
Рассмотрим
методику нахождения интегрального
квадратичного критерия переходного
режима для регулярного воздействия x(t).
Изображение
динамической ошибки можно записать в
виде произведения
|
e(p) = |
(29) |
Не
прибегая к нахождению оригинала eх(t), можно
найти установившееся значение ошибки
управления
![]() ,
,
или
![]() .
.
Если
из полной ошибки eх(t)
вычесть ошибку установившегося
режима eх уст,
то получим составляющую, которая равна
ошибке переходного режима
еп(t) =
eх (t) —
eх уст.
Очевидно,
что
еп(t) ![]() 0
0
при t ![]()
![]() ,
,
так как eх (t) ![]() eх уст.
eх уст.
Интегральный
квадратичный критерий качества
переходного режима определим как
величину
![]()
На
основании известной теоремы Парсеваля,
нахождение интегрального квадратичного
критерия качества Q переходного
режима сводится к вычислению интеграла
Парсеваля
|
|
(30) |

Чтобы
вычислить конкретное значение этого
интеграла, функцию eп(p)
записывают в виде отношения полиномов
 .
.
Тогда
интеграл будет функцией параметров a ,
и b . Значения функций табулированы
и для n <
4 приведены в табл.
П.3.
Изображение
ошибки переходного режима получаем из
формулы:
![]()
где
учтено, что изображение от
постоянной ex уст равно e x уст /p.
Пример.
Найдем
интегральный квадратичный критерий
качества переходного процесса в системе
управления антенной.
Передаточная
функция разомкнутой системы
 ,
,
Передаточная
функция ошибки по задающему воздействию
равна
 .
.
Так
как рассматривается переходный процесс,
то воздействием является единичная
функция
x(t) = 1 (t)
с
изображением
x(p)=1/p .
Изображение
ошибки управления
 .
.
Установившееся
значение ошибки
![]()
В
итоге получим, что изображение ошибки
переходного режима равно

где
a 0 =
1+K;
a 1 =
T; b 0 =
K; b 1 =
1+K; b 2 =
T.
Согласно
формуле (30)
интегральный квадратичный критерий
качества переходного режима равен
интегралу Парсеваля
Q
= I
[e п (p)].
Используя
данные табл.
П.3. для n =
2, находим значение интеграла
 .
.
Из
этого результата видно, что изменением
параметров системы можно в широких
пределах изменить величину критерия.
Особенно характерны в этом отношении
два параметра: Rи T.
На
практике для регулировки показателей
переходного процесса широко используют
коэффициент преобразования К элемента,
не охваченного внутренней обратной
связью. В то же время постоянную
времени T усилителя
следует подбирать так, чтобы величина
первого слагаемого критерия не превышала
допустимого уровня.
252
Точность САУ
Точность
САУ оценивается в установившемся режиме
по величине установившейся ошибки при
типовых воздействиях. При анализе
точности систем рассматривается
установившийся режим, так как текущее
значение ошибки резко меняется вследствие
наличия переходных процессов и не может
быть мерой точности.
Рассмотрим
систему представленную на рис. 1.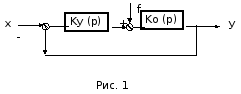
На
схеме приняты следующие обозначения:
Kу(p)
– передаточная функция устройства
управления; K0(p)
– передаточная функция объекта
управления; f
–
возмущающее воздействие; x
–
задающее воздействие; y
– регулируемая величина.
Ошибка
по задающему воздействию равна (t)
= x(t) – y(t).
Изображение
ошибки равно

(1)
Установившееся
значение ошибки определяется с помощью
теоремы о конечном значении функции

(2)
Ошибка
по возмущению воздействию равна (t)
= – y(t),
т.е. равна изменению регулируемой
величины под действием возмущения при
отсутствии входного воздействия.
В общем
случае как задающее, так и возмущающее
воздействия являются сложными функциями
времени. При определении ошибок пользуются
типовыми воздействиями, которые с одной
стороны соответствуют наиболее тяжелым
режимам работы системы и, вместе с тем,
достаточно просты для аналитических
исследований.
Кроме
того, типовые воздействия удобны для
сравнительного анализа различных
систем, и соответствуют наиболее часто
применяемым законам изменения управляющих
и возмущающих воздействий.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
04.08.2019142.76 Кб022.rtf
- #
- #
- #
- #
- #
- #
04.08.2019112.25 Кб126.rtf
- #
- #
- #
- #
Интегральная квадратичная ошибка
Cтраница 1
Интегральная квадратичная ошибка определяется как интеграл квадратов мгновенных ( текущих) значений рассогласования. При возведении в квадрат текущих значении рассогласования отрицательные величины не компенсируют положительные, поэтому с возрастанием рассогласования интегральная квадратичная ошибка растет очень быстро.
[1]
Эти коэффициенты соответствуют минимуму интегральной квадратичной ошибки между f ( t) и апроксимирующей функцией, что вытекает из (9.81), если Г оо. Полная функция f ( t) подбирается так, чтобы при этом значении Т получить наилучшую апроксимацию.
[2]
В этом разделе в качестве критерия оценки точности апроксимации применяется интегральная квадратичная ошибка. Выбор этого критерия диктуется главным образом удобством его применения; вместе с тем во многих конкретных случаях он служит весьма хорошей оценкой точности апроксимации. В нем одинаково учитываются как положительные, так и отрицательные ошибки. Критерий интегральной квадратичной ошибки достаточно хорошо оценивает большие и длительные ошибки, а малые и кратковременные ошибки слабо сказываются на его величине.
[3]
Экспоненциальные функции не являются ортогональными в любом интервале, так что критерий минимума интегральной квадратичной ошибки к такому ряду функций приложить нелегко.
[4]
С усилением интегрального воздействия ( уменьшение времени интегрирования) процесс из апериодического переходит в колебательный со все более уменьшающейся степенью затухания; при этом динамическая ошибка регулирования уменьшается, а время регулирования и интегральная квадратичная ошибка регулирования возрастают.
[5]
Для выбора наиболее рациональных с точки зрения технологии переходных процессов по каналам регулирования обычно выполняются расчеты для четырех процессов регулирования: без перерегулирования, с 20 % — ным перерегулированием, с минимальным временем регулирования и с минимальной интегральной квадратичной ошибкой.
[7]
Интегральные ошибки этих трех переходных процессов равны, так как настройки диапазона пропорциональности и времени изо-дрома регулятора во всех случаях одинаковы. Интегральная квадратичная ошибка последнего переходного процесса меньше, чем у первых двух, так как он имеет меньшую динамическую ошибку.
[9]
В частности, это имеет место для систем с симметричными и кососимметрич-ньгми матрицами А в силу ортогональности их канонических базисов. Эквивалентные сепаратные системы равноправны с точки зрения квадратичной оценки для системы в целом: значения их интегральных квадратичных ошибок входят в сумму ( ИЗ) с одинаковым весом.
[10]
Интегральная квадратичная ошибка определяется как интеграл квадратов мгновенных ( текущих) значений рассогласования. При возведении в квадрат текущих значении рассогласования отрицательные величины не компенсируют положительные, поэтому с возрастанием рассогласования интегральная квадратичная ошибка растет очень быстро.
[11]
Для большинства методов решения задачи синтеза оптимальных виброзащитных систем характерны следующие принципы: используется линейная динамическая модель с одной степенью свободы; для системы с двумя степенями свободы рассматриваются лишь частные случаи синтеза; учитывается не более одного ограничения; для одной и той же модели изменение спектральной плотности воздействия приводит к необходимости повторения процесса решения задачи. Например, для синтеза оптимальной системы с активным динамическим гасителем колебаний ( судовых механизмов и машин) был выбран метод минимально-квадратичной оптимизации, позволяющий синтезировать системы с наименьшим значением интегральной квадратичной ошибки при учете ограничений, накладываемых объектом.
[12]
На практике наиболее широкое распространение при оценке качества работы ристем регулирования получили интегральная и интегральная квадратичная ошибки. Принципиальное отличие между ними состоит в том, что вторая учитывает абсолютное значение ошибки. Например, две кривые переходного процесса с различными амплитудами колебаний параметра могут иметь одинаковые интегральные ошибки, но разные интегральные квадратичные ошибки.
[13]
В этом разделе в качестве критерия оценки точности апроксимации применяется интегральная квадратичная ошибка. Выбор этого критерия диктуется главным образом удобством его применения; вместе с тем во многих конкретных случаях он служит весьма хорошей оценкой точности апроксимации. В нем одинаково учитываются как положительные, так и отрицательные ошибки. Критерий интегральной квадратичной ошибки достаточно хорошо оценивает большие и длительные ошибки, а малые и кратковременные ошибки слабо сказываются на его величине.
[14]
Страницы:
1
2
Интегральные оценки качества являются интегралами по времени от некоторых функций переходного процесса свободной составляющей выходной величины  или ошибки
или ошибки  Цель использования таких критериев состоит в том, чтобы получить общую оценку быстродействия и отклонения регулируемой величины от установившегося значения. Широко используются линейные и квадратичные интегральные оценки. Линейные оценки вычисляются по формуле
Цель использования таких критериев состоит в том, чтобы получить общую оценку быстродействия и отклонения регулируемой величины от установившегося значения. Широко используются линейные и квадратичные интегральные оценки. Линейные оценки вычисляются по формуле


Рис. 4.19

Рис. 4.20
Однако чаще используют моменты  порядка, т. е. оценки вида
порядка, т. е. оценки вида

Простейшей из этих оценок является  Если система устойчива, то
Если система устойчива, то  интеграл
интеграл  стремится к конечному значению, равному площади под кривой
стремится к конечному значению, равному площади под кривой  (рис. 4.19). Чем выше быстродействие системы, тем меньше величина
(рис. 4.19). Чем выше быстродействие системы, тем меньше величина  поэтому параметры системы следует выбирать так, чтобы
поэтому параметры системы следует выбирать так, чтобы  стремился к минимуму, т. е.
стремился к минимуму, т. е.  где А — варьируемый параметр системы. Недостатком этой оценки является то, что она применима к монотонным или апериодическим процессам. При колебательном процессе (рис. 4.20) площади, ограниченные
где А — варьируемый параметр системы. Недостатком этой оценки является то, что она применима к монотонным или апериодическим процессам. При колебательном процессе (рис. 4.20) площади, ограниченные  складывают алгебраически и минимуму
складывают алгебраически и минимуму  может соответствовать процесс с большим числом колебаний
может соответствовать процесс с большим числом колебаний  т. е., с малым быстродействием и даже с незатухающими колебаниями.
т. е., с малым быстродействием и даже с незатухающими колебаниями.
Для  изображение по Лапласу
изображение по Лапласу

Сравнивая это выражение с (4.47) для  можно записать
можно записать

Разложим  в ряд по степеням
в ряд по степеням 

Подставим (4.51) в выражение для определения  т. е.
т. е.

Если разложить  степеням s в ряд:
степеням s в ряд:

то, сопоставляя (4.52) и (4.53), можно сделать следующее заключение, приравнивая выражения при равных степенях 

Если сравнить результаты (4.50),  с коэффициентами ошибок, приведенными в § 4.2, то
с коэффициентами ошибок, приведенными в § 4.2, то  где
где  коэффициенты ошибок.
коэффициенты ошибок.
Квадратичные интегральные оценки вычисляются по формулам


где  — постоянные величины.
— постоянные величины.
Оценки  называют обобщенными квадратичными ценками.
называют обобщенными квадратичными ценками.
Геометрический смысл интегральной квадратичной оценки ояснен на рис. 4.21. Выбирая параметры системы по минимуму квадратичной интегральной оценки  приближаем кривую
приближаем кривую  к осям
к осям 
Методы вычисления этих оценок предложены А. И. Манелыптамом и Н. Д. Папалекси в 1909 г. В 1937 г. акад. А. А. [аркевич применил эту оценку для исследования режимов аботы усилителей, в 1948 г. А. А. Красовский и А. А. Фельдаум использовали ее для исследования качества линейных истем автоматического регулирования.
Рассмотрим методы вычисления квадратичных интегральных оценок  По определению,
По определению, 

По теореме о предельных переходах,

педовательно,

Поскольку  — дробно-ациональная функция, то и
— дробно-ациональная функция, то и  можно записать в виде дробно-рациональной функции:
можно записать в виде дробно-рациональной функции:


Рис. 4.21
При  оценку
оценку  можно вычислить, используя коэффициенты
можно вычислить, используя коэффициенты  по формулам, приведенным ниже без вывода [4]:
по формулам, приведенным ниже без вывода [4]:

где  — определитель Гурвица, составленный из коэффициентов:
— определитель Гурвица, составленный из коэффициентов:

в котором все коэффициенты с меньшим индексом 0 и большим  заменяют нулями. Определители
заменяют нулями. Определители  получают из (4.62) заменой столбца
получают из (4.62) заменой столбца  столбцом
столбцом  .
.
Коэффициенты  определяют как
определяют как

Интегральную квадратичную оценку  можно вычислять по заданной частотной характеристике замкнутой системы.
можно вычислять по заданной частотной характеристике замкнутой системы.
Пусть  — изображение Фурье для функции
— изображение Фурье для функции  на основании теоремы свертки в комплексной области для
на основании теоремы свертки в комплексной области для  можно записать [7] при
можно записать [7] при 

где  комплексный коэффициент усиления замкнутой системы.
комплексный коэффициент усиления замкнутой системы.
Таким образом, по (4.64) и (4.65) можно вычислить  Выражение (4.64) есть формула Рэлея.
Выражение (4.64) есть формула Рэлея.
Существуют таблицы расчета интеграла  в функции коэффициентов
в функции коэффициентов  изображения по Лапласу сигнала ошибки
изображения по Лапласу сигнала ошибки  для
для  и до
и до  . В табл. 4.1 приведены формулы для
. В табл. 4.1 приведены формулы для  при
при 
Таблица 4.1

где

При выборе параметров системы по минимуму оценки  часто получают нежелательную колебательность процесса, так как приближение процесса
часто получают нежелательную колебательность процесса, так как приближение процесса  к идеальному скачку вызывает резкое увеличение начальной скорости, что, в свою очередь, может вызвать высокое перерегулирование, уменьшив
к идеальному скачку вызывает резкое увеличение начальной скорости, что, в свою очередь, может вызвать высокое перерегулирование, уменьшив
при этом запас устойчивости. В обобщенных квадратичных оценках  накладывают ограничение не только на величину отклонения
накладывают ограничение не только на величину отклонения  но и на скорость отклонения
но и на скорость отклонения  а также и на производные второго, третьего и высших порядков в
а также и на производные второго, третьего и высших порядков в  что означает приближение кривой не к ступенчатой функций, а к экспоненте в случае
что означает приближение кривой не к ступенчатой функций, а к экспоненте в случае  и к более плавной, но сложной кривой в случае использования
и к более плавной, но сложной кривой в случае использования  При выборе параметров САУ по минимуму
При выборе параметров САУ по минимуму  существен выбор постоянных
существен выбор постоянных  определяющих вес производных в обобщенных квадратичных оценках (4.58), (4.59). Значительное увеличение
определяющих вес производных в обобщенных квадратичных оценках (4.58), (4.59). Значительное увеличение  приводит к отсутствию перерегулирования, но увеличивает время регулирования. При малых
приводит к отсутствию перерегулирования, но увеличивает время регулирования. При малых  уменьшение колебательности будет незначительным. Выбор
уменьшение колебательности будет незначительным. Выбор  осуществляется с учетом постоянной времени экстремали, к которой целесообразно приближать процесс.
осуществляется с учетом постоянной времени экстремали, к которой целесообразно приближать процесс.
Остановимся на методике расчета системы по минимуму обобщенной квадратичной оценки:

Этот интеграл можно представить в виде суммы двух интегралов:

Если система устойчива, то  тогда
тогда

Кроме того, интеграл  будет иметь минимально возможное значение
будет иметь минимально возможное значение

при

Если

то решение дифференциального уравнения (4.68)

является оптимальным по минимуму (экстремальным) переходным процессом (где  — постоянная времени этого процесса).
— постоянная времени этого процесса).
При выборе параметров системы по минимуму  обычно имеет место отклонение
обычно имеет место отклонение  от наименьшего значения
от наименьшего значения 
А. А. Фельдбаумом [10] было показано, что переходный процесс будет отличаться от экстремального на величину, меньшую  , т. е.
, т. е.

По величине 6 можно оценить отклонение истинного переходного процесса  от экстремального (рис. 4.22). При увеличении порядка системы увеличивается и ширина зоны
от экстремального (рис. 4.22). При увеличении порядка системы увеличивается и ширина зоны  при этом уменьшается точность оценки качества системы (приближения переходного процесса к экстремали); во избежание этого используют оценки вида (4.59). Величину
при этом уменьшается точность оценки качества системы (приближения переходного процесса к экстремали); во избежание этого используют оценки вида (4.59). Величину  задают по требуемому времени регулирования
задают по требуемому времени регулирования 
Следует заметить, что задача выбора параметров по минимуму  или
или  решается аналитически лишь в несложных случаях для САУ невысокого порядка. В противном случае расчеты существенно усложняются и задачу следует решать численно на ЦВМ.
решается аналитически лишь в несложных случаях для САУ невысокого порядка. В противном случае расчеты существенно усложняются и задачу следует решать численно на ЦВМ.
Рассмотрим примеры выбора оптимального значения какого-либо параметра системы по минимуму 
Пример 4.4. Вычислить значение коэффициента усиления системы, минимизирующие

Рис. 4.22
мизирующее квадратичную интегральную оценку  Известна передаточная, функция разомкнутой системы
Известна передаточная, функция разомкнутой системы

где 
Входной сигнал — единичная функция  Изображение отклонения
Изображение отклонения  по Лапласу
по Лапласу

где 
Воспользуемся формулами для вычисления  приведенными в табл. 4.1 для
приведенными в табл. 4.1 для 

Определим частную производную:

Определим  из
из  Подставляя числовые значения коэффициентов, получим
Подставляя числовые значения коэффициентов, получим

откуда 
Пример 4.5. Определить оптимальное значение коэффициента усиления к, соответствующее минимуму обобщенной квадратичной оценки
Передаточная функция разомкнутой системы  .
.
Входной сигнал — единичная функция  Можно представить
Можно представить  в виде суммы:
в виде суммы:

Изображение отклонения  по Лапласу
по Лапласу

где 
Воспользуемся данными табл. 4.1 и определим значение  для
для 

Определим изображение производной  из свойства преобразований Лапласа:
из свойства преобразований Лапласа:

По теореме о предельном переходе,

Тогда 
где 
Теперь можно определить интеграл

пользуясь формулой для  из табл. 4.1 для
из табл. 4.1 для 

Итак, 
Определим  из
из  т. е.
т. е.

откуда 
Оптимальный переходный процесс описывается в соответствии с формулой (4.69) выражением

Так как  то по (4.66) наименьшее значение оценки
то по (4.66) наименьшее значение оценки  Следовательно
Следовательно  Согласно
Согласно  (рис. 4.2).
(рис. 4.2).
Интегральные оценки качества широко используются при синтезе оптимальных САУ в качестве критерия оптимальности.
Интегральная ошибка
Cтраница 1
Интегральная ошибка определяется как площадь, ограниченная кривой изменения регулируемого параметра и его заданным значением. Интегральная ошибка является одним из общепринятых критериев оценки качества регулирования. Так как возникающее при изменении нагрузки рассогласование в конце концов становится рав — х ным нулю, то в любом устойчивом контуре регулирования интегральная ошибка приближается к некоторому конечному значению.
[1]
Интегральные ошибки этих трех переходных процессов равны, так как настройки диапазона пропорциональности и времени изо-дрома регулятора во всех случаях одинаковы. Интегральная квадратичная ошибка последнего переходного процесса меньше, чем у первых двух, так как он имеет меньшую динамическую ошибку.
[3]
Большая интегральная ошибка при регулировании состава продукта приводит к значительному понижению качества последнего, поэтому для регулирования процесса ректификации целесообразно применение контуров с прямой связью. Иногда не представляется возможным автоматический анализ состава продукта на выходе из колонны, что также делает невозможным использование контуров регулирования с обратными связями. Кроме того, если реальные регулируемые параметры характеризуют собой экономику процесса, то, используя контуры регулирования с прямой связью, можно построить системы оптимального регулирования. Таким образом, при регулировании процессов ректификации целесообразно использовать контуры регулирования по возмущению.
[4]
Тогда условием получения минимальной интегральной ошибки при наилучшем варианте является уменьшение интервала регулирования, а при наихудшем — уменьшение дискретного интервала. Установлено, что длительность дискретного интервала должна превышать Td Дгс.
[6]
Хотя половина максимального коэффициента усиления обеспечивает минимум интегральной ошибки при ступенчатом изменении нагрузки ( см. гл.
[7]
Другой интегральной оценкой является оценка по квадратичной интегральной ошибке / г. Идея применения И.
[8]
Качество компенсации системы не может быть определено только по величине относительной интегральной ошибки регулирования.
[10]
Полученная формула может служить основой для выбора параметров системы, оптимизирующих интегральную ошибку при заданных ограничениях на эти параметры и на начальное состояние системы.
[11]
Полученный результат показывает, что дополнительная положительная обратная связь регулятора значительно уменьшает абсолютную интегральную ошибку и время регулирования.
[12]
Любая система регулирования, удовлетворяющая перечисленным требованиям, будет также иметь и минимальную интегральную ошибку. Регулирующее устройство обычно выбирают исходя из степени сложности объекта регулирования.
[13]
Преимущества предлагаемого метода заключаются в том, что деятельность летчика оценивается-объективно по показателю интегральной ошибки управления, шкала которого практически неограничена, поэтому возможен анализ качества пилотирования на любой стадии тренировки. Значения интегрального показателя могут быть выражены по общепринятой 5-балльной шкале оценок.
[14]
В системах, у которых числитель передаточной функции — постоянная величина, при минимизации квадратичной интегральной ошибки процессы обычно имеют значительную колебательность. Это связано с тем, что минимизация / о равносильна стремлению максимально приблизить процесс к ступенчатой функции, что требует довольно энергичных воздействий на систему и приводит к перерегулированиям.
[15]
Страницы:
1
2
3
скорректированной
системы
5.1 Моделирование системы на авм
Исходным выражением для моделирования
является передаточная функция разомкнутой
скорректированной системы Wск(р).
![]()
Составим аналоговую модель системы на
основании моделей типовых динамических
звеньев. Схема модели приведена на
рисунке 7.
Рассчитаем машинные коэффициенты
модели.
Машинные коэффициенты преобразующего
элемента:
![]()
Машинные коэффициенты корректирующего
устройства:
![]()
![]()
![]()
![]()
![]()
![]()
Машинные коэффициенты управляющего
устройства:
![]()
![]()
Машинные коэффициенты исполнительного
устройства:
![]()
![]()
Машинные коэффициенты объекта управления:
![]()
![]()
![]()
![]()
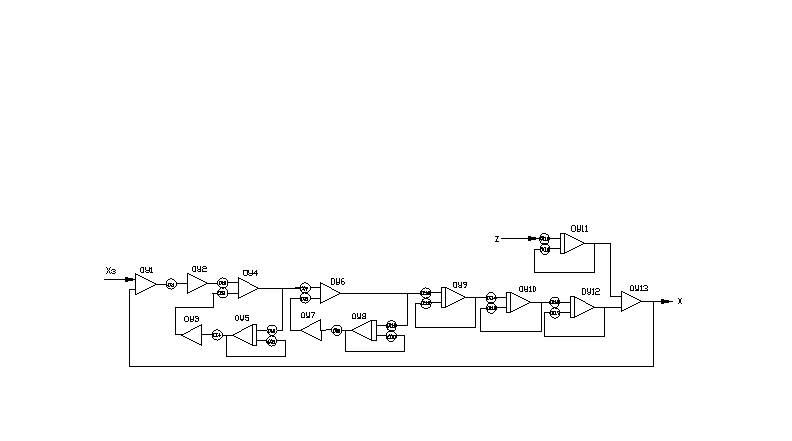 Рисунок
Рисунок
7 — Схема аналоговой модели системы
-
Моделирование системы на ЦВМ
Для цифрового моделирования системы
используем среду MatlabприложениеSimulink. Схема
цифровой модели системы, составленная
из типовых звеньев библиотекиSimulink,
показана на рисунке 8.
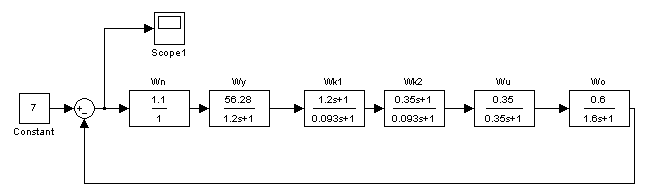
Рисунок 8 — Схема цифровой модели системы
Результатом моделирования является
переходная характеристика по каналу
ошибки xз– ε ,
регистрируемая приборомScope1.
Переходная характеристика системы по
каналу ошибкиxз–
ε приведена на рисунке 9.
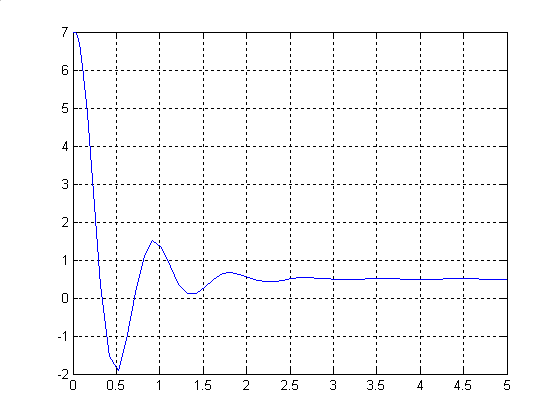
Рисунок 9 — Переходная характеристика
системы по каналу ошибки xз– ε
По графику переходного процесса определим
перерегулирование, время переходного
процесса и сравним полученные значения
с заданными.
ε(∞)=0,5 — что удовлетворяет заданию
6. Вычисление и минимизация квадратичной интегральной оценки
при типовом
воздействии
Исходным выражением для вычисления
квадратичной интегральной оценки
является передаточная функция замкнутой
скорректированной системы по каналу
хз-ε
при
единичном ступенчатом воздействии (то
есть принимаем задающее воздействие
Хз(t)=1,
а следовательно Хз(р)=1/р).
Запишем эту передаточную функцию:

Раскроем скобки и приведем передаточную
функцию к стандартному виду:

Подставим в формулу численные значения:
![]()
![]()
Запишем выражение для изображения
переходной составляющей сигнала ошибки:
![]()

Так как передаточный коэффициент
разомкнутого контура kрк≥10
допускается упростить выражение для
изображения переходной составляющей
с учетом следующих условий:
kрк+1=kркиkрк-1=kрк
Преобразуем выражение для изображения
переходной составляющей сигнала ошибки,
используя вышеприведенные условия:

=

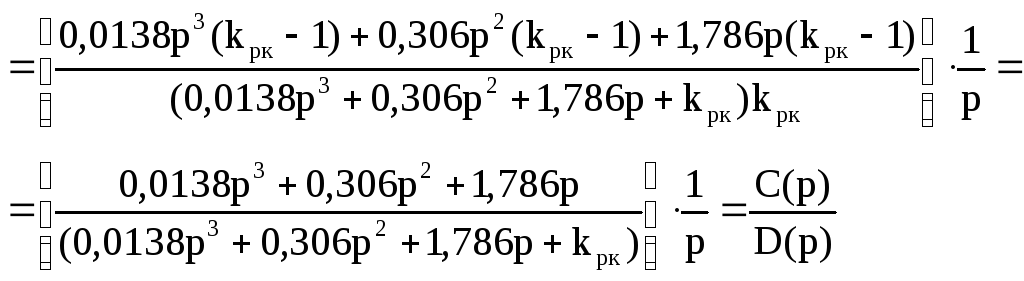
![]()
Для вычисления квадратичной оценки по
изображению используют равенство
Парсеваля, которое имеет вид:
![]()
Где
![]()
![]()
![]()
Таким образом коэффициенты diиviравны:
do =0,0138 vo
=0,00019
d1 =0,306 v1
=-0,143
d2 =1,786v2
=3,19
d3
= kрк
Составим определитель Δ по правилу
составления определителя Гурвица

![]()
Определитель vсоставляем из определителяпутем замены коэффициентов верхней
строки на коэффициенты0,1и2.

![]()
Вычисляем квадратичную интегральную
оценку:
![]()
Задаваясь численными значениями kрк,
составляем таблицу зависимости
квадратичной интегральной оценки от
коэффициентаkрк,
которая приведена ниже.
Таблица 3. – Расчетные данные для
построения кривой зависимости интегральной
оценки от передаточного коэффициента
разомкнутого контура
|
kрк |
Qкв |
|
0 |
∞ |
|
1 |
1,039 |
|
2 |
0,63 |
|
5 |
0,37 |
|
8 |
0,325 |
|
10 |
0,317 |
|
10,5 |
0,366 |
|
10,56 |
0,3165 |
|
11 |
0,31,68 |
|
12 |
0,3174 |
|
20 |
0,39 |
|
24 |
0,47 |

Рисунок 9 — Кривая зависимости интегральной
оценки от передаточного коэффициента
разомкнутого контура
Из рисунка 9 видно, что оптимальным
значением kркявляетсяkрк=10,56.
При данном значении коэффициента
разомкнутого контура система будет
работать в оптимальном режиме, обеспечивая
минимальную площадь под графиком
переходного процесса.
Теперь перейдем от коэффициента kркк передаточному коэффициентуkу.
Для этого воспользуемся следующей
формулой:
![]()
При коэффициенте kрк=12,96
и квадратичной интегральной оценке
равнойQ=0.3218 передаточный
коэффициент управляющего устройстваkу.= 56,28.
Вывод: В этом разделе с помощью квадратичной
интегральной оценки получили оптимальное
значение передаточного коэффициента
управляющего устройства (kу=45,8).
Этот коэффициент получился меньше, чем
тот, что был выбран в разделе 2 (kу=56,28).
Следовательно, при выборе этого
коэффициента точность системы в
установившемся режиме увеличится, но
могут получиться более колебательные
переходные процессы.
-
Вычисление и
минимизация дисперсии сигнала ошибки
при случайных воздействиях
Дисперсия сигнала ошибки Dпри действии на систему внешних
некоррелированных воздействий хзиgможет быть представлена
суммой:
![]()
где Dз– дисперсия, обусловленная неточным
воспроизведением задающего воздействия;
Deg– дисперсия, обусловленная неполным
подавлением помех.
Вычислим дисперсию, обусловленную
неточным воспроизведением задающего
воздействия:
![]()
где Sхз(ω) –
спектральная плотность полезного
сигнала
![]()
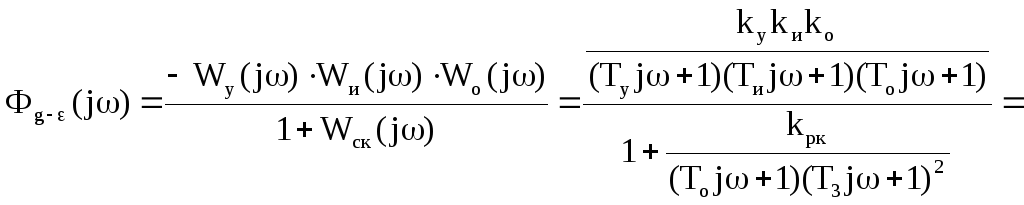
Запишем передаточную функцию замкнутого
контура по каналу ошибки хз-х.

![]()
Заменяем оператор р на jω:
![]()
Подставим это выражение в формулу
дисперсии, обусловленной неточным
воспроизведением задающего воздействия:

![]() =
=
=
 =
=

где
![]()
![]()
![]()
Подставим это выражение в формулу
дисперсии, обусловленной неточным
воспроизведением задающего воздействия:


Вычисление дисперсии неточного задающего
воспроизведения вычислим по формуле:
![]()
Запишем коэффициенты viиdi
для составления определителей Δ и
Δv :
v0=0.0024d0=0.0138
v1=-4.26d1=0.307
v2=45.624d2=1.817
v3=12d3=1.1786+kрк
d4=0,1+0,1kрк
Определитель составляется из коэффициентовdiпо правилу составления определителя
Гурвица.

Определитель Δv
составляем путем замены коэффициентов
верхней строки матрицы Δ на коэффициентыvi
.

где Аij —
алгебраические дополнения элементов
определителя
![]()
![]()
![]()

Подставим значения алгебраических
дополнений в формулы определителей Δ
и Δ1 .
![]()
![]()
![]()
![]()
![]()
 =
=

Далее вычислим дисперсию, обусловленную
неполным подавлением помехи:
![]()
где Sg()
– спектральная плотность помехи
![]() =120
=120
Запишем передаточную функцию
скорректированной системы по каналу
«g-»:
Отдельно раскроем скобки и приведем
подобные члены знаменателя, после чего
подставим численные значения постоянных
времени.

Подставим численные значения в формулу
передаточной функции скорректированной
системы по каналу «g-»:


Далее подставим передаточную функцию
системы по каналу «g-»
в формулу дисперсии неполного подавления
помехи:
![]()


где
![]()
![]()
![]()
![]()
Подставим это выражение в формулу
дисперсии неполного подавления помехи:

По согласованию с преподавателем
упрощаем подынтегральное выражение
неполного подавления помехи до следующего:


Вычисление дисперсии неполного подавления
помехи вычислим по формуле:
![]()
Запишем коэффициенты viиdi
для составления определителей Δ и
Δv :
v0=0d0=0,165
v1=0,0084![]() d1=3,2
d1=3,2
v2=4,2![]() -2,04
-2,04![]() d2=0,462kрк+3,84
d2=0,462kрк+3,84
v3=120![]() d3=1.705kрк+3,67
d3=1.705kрк+3,67
d4=1,1+1,1kрк
Определитель составляется из коэффициентовdiпо правилу составления определителя
Гурвица.

Определитель Δv
составляем путем замены коэффициентов
верхней строки матрицы Δ на коэффициентыvi
.
 где
где
Аij —
алгебраические дополнения элементов
определителя

![]()
![]()

Подставим значения алгебраических
дополнений в формулы определителей Δ
и Δ1 .
![]()
![]()
![]()
![]()
 =
=

В соответствии с найденными аналитическими
выражениями дисперсии неточного
задающего воспроизведения и неполного
подавления помехи составим таблицу для
построения графиков Dεз
=f(kрк)
иDgε
=f(kрк),
а также суммарного графикаDε
=f(kрк).
Таблица 4 — Расчетные данные для построения
графиков зависимости дисперсии от
передаточного коэффициента разомкнутого
контура
-
kрк
Dεз
Dgε
Dε
0
41.17
0.5
23.52
1
16.36
1.92
9.89
2
9.48
3
6.45
4
4.81
5
3.81
8
2.3
10
1.81
12
1.5
12.92
1.39
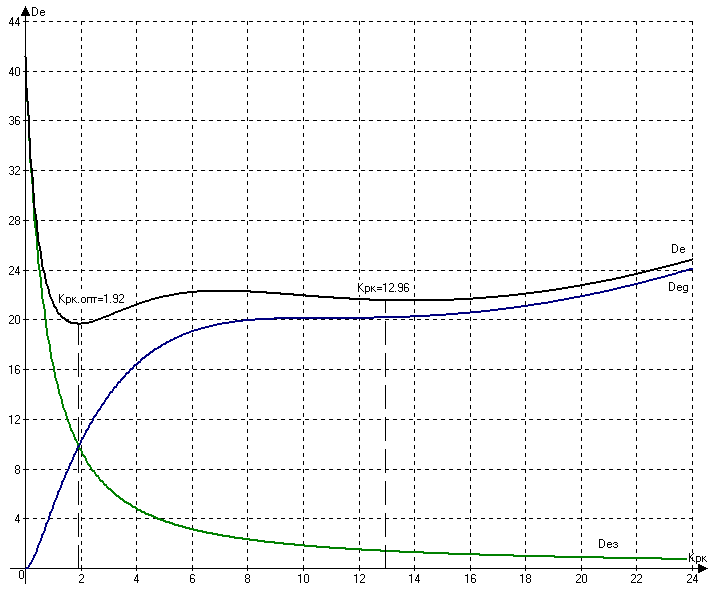
Рисунок 10 — Графики зависимости дисперсии
сигнала ошибки скорректированной
системы от передаточного коэффициента
разомкнутого контура
Как видно из рисунка 10 оптимальным
значением передаточного коэффициента
разомкнутого контура является kрк
=1,92 , при котором дисперсия сигнала
ошибки минимальна (D=19,9.)
Перейдем от коэффициента kркк передаточному коэффициенту управляющего
устройстваkу. Для
этого воспользуемся следующей формулой:
![]()
Вывод: Для оптимальной работы системы
по суммарной дисперсии сигнала ошибки
необходимо передаточный коэффициент
разомкнутого контура принять равным
1,92 , из чего следует, что передаточный
коэффициент управляющего устройства
должен быть равен 8,31. Но при таком
значении коэффициента управляющего
устройства заданная точность управления
системы не будет достигнута. В то же
время как видно из рисунка 10 при
коэффициенте kрк =12,96
на графике суммарной дисперсии сигнала
ошибки наблюдается прогиб, из чего
следует что при данном коэффициенте
разомкнутого контура при случайном
входном воздействии, оказываемом на
систему значение дисперсии будет
достаточным для обеспечения заданной
точности управления.
Соседние файлы в папке курсовая работа
- #
- #
- #
- #
22.02.201414.5 Кб24Курсовик.mcd
- #
- #
- #
- #
- #
- #
- #
22.02.2014876.14 Кб29курстау.mcd
Реферат
на тему:
«Интегральные методы оценки качества переходных процессов»
Введение
Интегральная оценка является обобщенным показателем качества переходного процесса, при этом качество системы оценивается с помощью числа, являющегося интегралом некоторой функции.
Особенность интегральной оценки в том, что в отличии от других методов оценки качества, величина интеграла представляет число, которое ничего не говорит о характере переходного процесса, о конкретных показателях качества, зато, в сравнении с другими, метод отличается простотой.
Линейная интегральная оценка
Рассмотрим переходные процессы, приведенные на рис. 1а-в.
а б в
Рис. 1
Заштрихованная площадь называется площадью регулирования, она может быть оценкой качества переходного процесса. Чем меньше площадь, тем лучше качество переходного процесса.
Площадь регулирования может быть определена с помощью интеграла, который называется простой (линейной) интегральной оценкой
![]() (1)
(1)
Задача сводится к определению J1, не зная переходного процесса, т.е. по его изображению, так как изображение проще определить.
Пусть известно
![]() (1)
(1)
Если сравнивать выражения (1) и (2), то они отличаются на множитель e-pt. При этом
, (3)
т.е. получили простую формулу для определения площади регулирования, а значит и оценки качества процесса регулирования.
Так как z(p) = y(p) – y /p, то значение интеграла (1) можно вычислить по формуле
(4)
Недостаток метода
Рассмотрим переходный процесс (рис. 2).
Рис. 2
Процесс затухает медленно, следовательно, качество системы плохое, но так как площади имеют разные знаки, то величина интеграла J1 будет мала. Поэтому этот метод не применим для колебательных переходных процессов, т.е. он пригоден только для монотонных процессов, поэтому ограничен в применении.
Хорошей оценкой мог бы служить интеграл
, (5)
Но его сложно вычислять, необходимо решать характеристическое уравнение.
Пример 5. Вычислить величину J1 для заданной системы (рис. 3).
Решение:
-
Определим y(p)
-
Определим y
Рис. 3
3. Определим величину интеграла J1
Интегральная квадратичная оценка
Интегральная квадратичная оценка пригодна для любых переходных процессов, и вычисляется по формуле
(6)
Подинтегральное выражение – z2(t) всегда положительно не зависимо от знака функции z(t).
Определим J2 без расчета переходного процесса, для этого воспользуемся дуальной теоремой.
Рис. 4
Основная теорема: произведению изображений соответствует свертка оригиналов
(7)
Дуальная теорема: произведению оригиналов соответствует свертка изображений
(8)
Так как ,
то можно получить следующую формулу для расчета квадратичной интегральной оценки
(9)
Этот интеграл можно вычислить либо с помощью вычетов по полюсам подинтегральной функции, либо с использованием табулированных значений интеграла для функции
(10)
В таблице 1 приведены табулированные значения интеграла для n = 1 3 для систем более высокого порядка таблицы приведены в литературе [5].
Таблица 1
Недостаток метода. Рассмотрим переходные процессы (рис. 5).
а) б)
Рис. 5
При использовании этого метода два процесса могут иметь одинаковую площадь регулирования, но оба они плохие по различным показателям качества, у первого большое время регулирования, а во втором большое перерегулирование.
Пример 6. Вычислить величину J2 для заданной системы (рис. 6).
Решение:
1. Определим y(p)
-
Определим y
Рис. 6
3. Определим z(p)
4. Определим величину интеграла J2 с помощью вычетов s1 = – k/T
5. Определим величину интеграла J2 с помощью таблиц
Модифицированная интегральная оценка
При использовании модифицированной (улучшенной) интегральной оценки минимизируем не только квадратичное отклонение z(t), но и его производную – z’ (t). Такой оценкой является интеграл
(11)
где – постоянная времени.
Минимуму интеграла соответствует приближение переходного процесса не к ступенчатому, а к некоторому экспоненциальному с заданной постоянной времени (которая называется экстремалью). Применение этой оценки приводит к более пологим переходным процессам, т.е. менее колебательным и имеющим меньшее число перерегулирований.
Недостаток метода: Сложность выбора экстремали, она выбирается на основе опыта.
Достоинства и недостатки интегральных методов
Достоинства методов:
-
Простота.
2. Оценка качества является обобщенной (в виде одного числа), что удобно при оптимизации систем и для сравнительного анализа систем
Недостатки методов:
1. Каждый методов имеет свои специфические, ранее рассмотренные недостатки.
2. Величина интеграла представляет число, которое ничего не говорит о характере переходного процесса, т.е. о конкретных показателях качества.
Литература
-
Бесекерский В.А., Попов Е.П. «Теория систем автоматического управления». Профессия, 2003 г. – 752 с.
-
Справочник по теории автоматического управления. /Под ред. А.А. Красовского – М.: Наука, 1987. – 712 с.
-
Сборник задач по теории автоматического регулирования и управления/ Под редакцией В.А. Бесекерского. – M.: Наука, 1978.
-
Бронштейн И.Н., Семендяев К.Н. Справочник по математике для инженеров и учащихся вузов. – М.: Наука, 1986.