Нейронные сети обучаются с помощью тех или иных модификаций градиентного спуска, а чтобы применять его, нужно уметь эффективно вычислять градиенты функции потерь по всем обучающим параметрам. Казалось бы, для какого-нибудь запутанного вычислительного графа это может быть очень сложной задачей, но на помощь спешит метод обратного распространения ошибки.
Открытие метода обратного распространения ошибки стало одним из наиболее значимых событий в области искусственного интеллекта. В актуальном виде он был предложен в 1986 году Дэвидом Э. Румельхартом, Джеффри Э. Хинтоном и Рональдом Дж. Вильямсом и независимо и одновременно красноярскими математиками С. И. Барцевым и В. А. Охониным. С тех пор для нахождения градиентов параметров нейронной сети используется метод вычисления производной сложной функции, и оценка градиентов параметров сети стала хоть сложной инженерной задачей, но уже не искусством. Несмотря на простоту используемого математического аппарата, появление этого метода привело к значительному скачку в развитии искусственных нейронных сетей.
Суть метода можно записать одной формулой, тривиально следующей из формулы производной сложной функции: если $f(x) = g_m(g_{m-1}(ldots (g_1(x)) ldots))$, то $frac{partial f}{partial x} = frac{partial g_m}{partial g_{m-1}}frac{partial g_{m-1}}{partial g_{m-2}}ldots frac{partial g_2}{partial g_1}frac{partial g_1}{partial x}$. Уже сейчас мы видим, что градиенты можно вычислять последовательно, в ходе одного обратного прохода, начиная с $frac{partial g_m}{partial g_{m-1}}$ и умножая каждый раз на частные производные предыдущего слоя.
Backpropagation в одномерном случае
В одномерном случае всё выглядит особенно просто. Пусть $w_0$ — переменная, по которой мы хотим продифференцировать, причём сложная функция имеет вид
$$f(w_0) = g_m(g_{m-1}(ldots g_1(w_0)ldots)),$$
где все $g_i$ скалярные. Тогда
$$f'(w_0) = g_m'(g_{m-1}(ldots g_1(w_0)ldots))cdot g’_{m-1}(g_{m-2}(ldots g_1(w_0)ldots))cdotldots cdot g’_1(w_0)$$
Суть этой формулы такова. Если мы уже совершили forward pass, то есть уже знаем
$$g_1(w_0), g_2(g_1(w_0)),ldots,g_{m-1}(ldots g_1(w_0)ldots),$$
то мы действуем следующим образом:
-
берём производную $g_m$ в точке $g_{m-1}(ldots g_1(w_0)ldots)$;
-
умножаем на производную $g_{m-1}$ в точке $g_{m-2}(ldots g_1(w_0)ldots)$;
-
и так далее, пока не дойдём до производной $g_1$ в точке $w_0$.
Проиллюстрируем это на картинке, расписав по шагам дифференцирование по весам $w_i$ функции потерь логистической регрессии на одном объекте (то есть для батча размера 1):

Собирая все множители вместе, получаем:
$$frac{partial f}{partial w_0} = (-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
$$frac{partial f}{partial w_1} = x_1cdot(-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
$$frac{partial f}{partial w_2} = x_2cdot(-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
Таким образом, мы видим, что сперва совершается forward pass для вычисления всех промежуточных значений (и да, все промежуточные представления нужно будет хранить в памяти), а потом запускается backward pass, на котором в один проход вычисляются все градиенты.
Почему же нельзя просто пойти и начать везде вычислять производные?
В главе, посвящённой матричным дифференцированиям, мы поднимаем вопрос о том, что вычислять частные производные по отдельности — это зло, лучше пользоваться матричными вычислениями. Но есть и ещё одна причина: даже и с матричной производной в принципе не всегда хочется иметь дело. Рассмотрим простой пример. Допустим, что $X^r$ и $X^{r+1}$ — два последовательных промежуточных представления $Ntimes M$ и $Ntimes K$, связанных функцией $X^{r+1} = f^{r+1}(X^r)$. Предположим, что мы как-то посчитали производную $frac{partialmathcal{L}}{partial X^{r+1}_{ij}}$ функции потерь $mathcal{L}$, тогда
$$frac{partialmathcal{L}}{partial X^{r}_{st}} = sum_{i,j}frac{partial f^{r+1}_{ij}}{partial X^{r}_{st}}frac{partialmathcal{L}}{partial X^{r+1}_{ij}}$$
И мы видим, что, хотя оба градиента $frac{partialmathcal{L}}{partial X_{ij}^{r+1}}$ и $frac{partialmathcal{L}}{partial X_{st}^{r}}$ являются просто матрицами, в ходе вычислений возникает «четырёхмерный кубик» $frac{partial f_{ij}^{r+1}}{partial X_{st}^{r}}$, даже хранить который весьма болезненно: уж больно много памяти он требует ($N^2MK$ по сравнению с безобидными $NM + NK$, требуемыми для хранения градиентов). Поэтому хочется промежуточные производные $frac{partial f^{r+1}}{partial X^{r}}$ рассматривать не как вычисляемые объекты $frac{partial f_{ij}^{r+1}}{partial X_{st}^{r}}$, а как преобразования, которые превращают $frac{partialmathcal{L}}{partial X_{ij}^{r+1}}$ в $frac{partialmathcal{L}}{partial X_{st}^{r}}$. Целью следующих глав будет именно это: понять, как преобразуется градиент в ходе error backpropagation при переходе через тот или иной слой.
Вы спросите себя: надо ли мне сейчас пойти и прочитать главу учебника про матричное дифференцирование?
Встречный вопрос. Найдите производную функции по вектору $x$:
$$f(x) = x^TAx, Ain Mat_{n}{mathbb{R}}text{ — матрица размера }ntimes n$$
А как всё поменяется, если $A$ тоже зависит от $x$? Чему равен градиент функции, если $A$ является скаляром? Если вы готовы прямо сейчас взять ручку и бумагу и посчитать всё, то вам, вероятно, не надо читать про матричные дифференцирования. Но мы советуем всё-таки заглянуть в эту главу, если обозначения, которые мы будем дальше использовать, покажутся вам непонятными: единой нотации для матричных дифференцирований человечество пока, увы, не изобрело, и переводить с одной на другую не всегда легко.
Мы же сразу перейдём к интересующей нас вещи: к вычислению градиентов сложных функций.
Градиент сложной функции
Напомним, что формула производной сложной функции выглядит следующим образом:
$$left[D_{x_0} (color{#5002A7}{u} circ color{#4CB9C0}{v}) right](h) = color{#5002A7}{left[D_{v(x_0)} u right]} left( color{#4CB9C0}{left[D_{x_0} vright]} (h)right)$$
Теперь разберёмся с градиентами. Пусть $f(x) = g(h(x))$ – скалярная функция. Тогда
$$left[D_{x_0} f right] (x-x_0) = langlenabla_{x_0} f, x-x_0rangle.$$
С другой стороны,
$$left[D_{h(x_0)} g right] left(left[D_{x_0}h right] (x-x_0)right) = langlenabla_{h_{x_0}} g, left[D_{x_0} hright] (x-x_0)rangle = langleleft[D_{x_0} hright]^* nabla_{h(x_0)} g, x-x_0rangle.$$
То есть $color{#FFC100}{nabla_{x_0} f} = color{#348FEA}{left[D_{x_0} h right]}^* color{#FFC100}{nabla_{h(x_0)}}g$ — применение сопряжённого к $D_{x_0} h$ линейного отображения к вектору $nabla_{h(x_0)} g$.
Эта формула — сердце механизма обратного распространения ошибки. Она говорит следующее: если мы каким-то образом получили градиент функции потерь по переменным из некоторого промежуточного представления $X^k$ нейронной сети и при этом знаем, как преобразуется градиент при проходе через слой $f^k$ между $X^{k-1}$ и $X^k$ (то есть как выглядит сопряжённое к дифференциалу слоя между ними отображение), то мы сразу же находим градиент и по переменным из $X^{k-1}$:

Таким образом слой за слоем мы посчитаем градиенты по всем $X^i$ вплоть до самых первых слоёв.
Далее мы разберёмся, как именно преобразуются градиенты при переходе через некоторые распространённые слои.
Градиенты для типичных слоёв
Рассмотрим несколько важных примеров.
Примеры
-
$f(x) = u(v(x))$, где $x$ — вектор, а $v(x)$ – поэлементное применение $v$:
$$vbegin{pmatrix}
x_1 \
vdots\
x_N
end{pmatrix}
= begin{pmatrix}
v(x_1)\
vdots\
v(x_N)
end{pmatrix}$$Тогда, как мы знаем,
$$left[D_{x_0} fright] (h) = langlenabla_{x_0} f, hrangle = left[nabla_{x_0} fright]^T h.$$
Следовательно,
$$
left[D_{v(x_0)} uright] left( left[ D_{x_0} vright] (h)right) = left[nabla_{v(x_0)} uright]^T left(v'(x_0) odot hright) =\
$$$$
= sumlimits_i left[nabla_{v(x_0)} uright]_i v'(x_{0i})h_i
= langleleft[nabla_{v(x_0)} uright] odot v'(x_0), hrangle.
,$$где $odot$ означает поэлементное перемножение. Окончательно получаем
$$color{#348FEA}{nabla_{x_0} f = left[nabla_{v(x_0)}uright] odot v'(x_0) = v'(x_0) odot left[nabla_{v(x_0)} uright]}$$
Отметим, что если $x$ и $h(x)$ — это просто векторы, то мы могли бы вычислять всё и по формуле $frac{partial f}{partial x_i} = sum_jbig(frac{partial z_j}{partial x_i}big)cdotbig(frac{partial h}{partial z_j}big)$. В этом случае матрица $big(frac{partial z_j}{partial x_i}big)$ была бы диагональной (так как $z_j$ зависит только от $x_j$: ведь $h$ берётся поэлементно), и матричное умножение приводило бы к тому же результату. Однако если $x$ и $h(x)$ — матрицы, то $big(frac{partial z_j}{partial x_i}big)$ представлялась бы уже «четырёхмерным кубиком», и работать с ним было бы ужасно неудобно.
-
$f(X) = g(XW)$, где $X$ и $W$ — матрицы. Как мы знаем,
$$left[D_{X_0} f right] (X-X_0) = text{tr}, left(left[nabla_{X_0} fright]^T (X-X_0)right).$$
Тогда
$$
left[ D_{X_0W} g right] left(left[D_{X_0} left( ast Wright)right] (H)right) =
left[ D_{X_0W} g right] left(HWright)=\
$$ $$
= text{tr}, left( left[nabla_{X_0W} g right]^T cdot (H) W right) =\
$$ $$
=
text{tr} , left(W left[nabla_{X_0W} (g) right]^T cdot (H)right) = text{tr} , left( left[left[nabla_{X_0W} gright] W^Tright]^T (H)right)
$$Здесь через $ast W$ мы обозначили отображение $Y hookrightarrow YW$, а в предпоследнем переходе использовалось следующее свойство следа:
$$
text{tr} , (A B C) = text{tr} , (C A B),
$$где $A, B, C$ — произвольные матрицы подходящих размеров (то есть допускающие перемножение в обоих приведённых порядках). Следовательно, получаем
$$color{#348FEA}{nabla_{X_0} f = left[nabla_{X_0W} (g) right] cdot W^T}$$
-
$f(W) = g(XW)$, где $W$ и $X$ — матрицы. Для приращения $H = W — W_0$ имеем
$$
left[D_{W_0} f right] (H) = text{tr} , left( left[nabla_{W_0} f right]^T (H)right)
$$Тогда
$$
left[D_{XW_0} g right] left( left[D_{W_0} left(X astright) right] (H)right) = left[D_{XW_0} g right] left( XH right) =
$$ $$
= text{tr} , left( left[nabla_{XW_0} g right]^T cdot X (H)right) =
text{tr}, left(left[X^T left[nabla_{XW_0} g right] right]^T (H)right)
$$Здесь через $X ast$ обозначено отображение $Y hookrightarrow XY$. Значит,
$$color{#348FEA}{nabla_{X_0} f = X^T cdot left[nabla_{XW_0} (g)right]}$$
-
$f(X) = g(softmax(X))$, где $X$ — матрица $Ntimes K$, а $softmax$ — функция, которая вычисляется построчно, причём для каждой строки $x$
$$softmax(x) = left(frac{e^{x_1}}{sum_te^{x_t}},ldots,frac{e^{x_K}}{sum_te^{x_t}}right)$$
В этом примере нам будет удобно воспользоваться формализмом с частными производными. Сначала вычислим $frac{partial s_l}{partial x_j}$ для одной строки $x$, где через $s_l$ мы для краткости обозначим $softmax(x)_l = frac{e^{x_l}} {sum_te^{x_t}}$. Нетрудно проверить, что
$$frac{partial s_l}{partial x_j} = begin{cases}
s_j(1 — s_j), & j = l,
-s_ls_j, & jne l
end{cases}$$Так как softmax вычисляется независимо от каждой строчки, то
$$frac{partial s_{rl}}{partial x_{ij}} = begin{cases}
s_{ij}(1 — s_{ij}), & r=i, j = l,
-s_{il}s_{ij}, & r = i, jne l,
0, & rne i
end{cases},$$где через $s_{rl}$ мы обозначили для краткости $softmax(X)_{rl}$.
Теперь пусть $nabla_{rl} = nabla g = frac{partialmathcal{L}}{partial s_{rl}}$ (пришедший со следующего слоя, уже известный градиент). Тогда
$$frac{partialmathcal{L}}{partial x_{ij}} = sum_{r,l}frac{partial s_{rl}}{partial x_{ij}} nabla_{rl}$$
Так как $frac{partial s_{rl}}{partial x_{ij}} = 0$ при $rne i$, мы можем убрать суммирование по $r$:
$$ldots = sum_{l}frac{partial s_{il}}{partial x_{ij}} nabla_{il} = -s_{i1}s_{ij}nabla_{i1} — ldots + s_{ij}(1 — s_{ij})nabla_{ij}-ldots — s_{iK}s_{ij}nabla_{iK} =$$
$$= -s_{ij}sum_t s_{it}nabla_{it} + s_{ij}nabla_{ij}$$
Таким образом, если мы хотим продифференцировать $f$ в какой-то конкретной точке $X_0$, то, смешивая математические обозначения с нотацией Python, мы можем записать:
$$begin{multline*}
color{#348FEA}{nabla_{X_0}f =}\
color{#348FEA}{= -softmax(X_0) odot text{sum}left(
softmax(X_0)odotnabla_{softmax(X_0)}g, text{ axis = 1}
right) +}\
color{#348FEA}{softmax(X_0)odot nabla_{softmax(X_0)}g}
end{multline*}
$$
Backpropagation в общем виде
Подытожим предыдущее обсуждение, описав алгоритм error backpropagation (алгоритм обратного распространения ошибки). Допустим, у нас есть текущие значения весов $W^i_0$ и мы хотим совершить шаг SGD по мини-батчу $X$. Мы должны сделать следующее:
- Совершить forward pass, вычислив и запомнив все промежуточные представления $X = X^0, X^1, ldots, X^m = widehat{y}$.
- Вычислить все градиенты с помощью backward pass.
- С помощью полученных градиентов совершить шаг SGD.
Проиллюстрируем алгоритм на примере двуслойной нейронной сети со скалярным output’ом. Для простоты опустим свободные члены в линейных слоях.
 Обучаемые параметры – матрицы $U$ и $W$. Как найти градиенты по ним в точке $U_0, W_0$?
Обучаемые параметры – матрицы $U$ и $W$. Как найти градиенты по ним в точке $U_0, W_0$?
$$nabla_{W_0}mathcal{L} = nabla_{W_0}{left({vphantom{frac12}mathcal{L}circ hcircleft[Wmapsto g(XU_0)Wright]}right)}=$$
$$=g(XU_0)^Tnabla_{g(XU_0)W_0}(mathcal{L}circ h) = underbrace{g(XU_0)^T}_{ktimes N}cdot
left[vphantom{frac12}underbrace{h’left(vphantom{int_0^1}g(XU_0)W_0right)}_{Ntimes 1}odot
underbrace{nabla_{hleft(vphantom{int_0^1}g(XU_0)W_0right)}mathcal{L}}_{Ntimes 1}right]$$
Итого матрица $ktimes 1$, как и $W_0$
$$nabla_{U_0}mathcal{L} = nabla_{U_0}left(vphantom{frac12}
mathcal{L}circ hcircleft[Ymapsto YW_0right]circ gcircleft[ Umapsto XUright]
right)=$$
$$=X^Tcdotnabla_{XU^0}left(vphantom{frac12}mathcal{L}circ hcirc [Ymapsto YW_0]circ gright) =$$
$$=X^Tcdotleft(vphantom{frac12}g'(XU_0)odot
nabla_{g(XU_0)}left[vphantom{in_0^1}mathcal{L}circ hcirc[Ymapsto YW_0right]
right)$$
$$=ldots = underset{Dtimes N}{X^T}cdotleft(vphantom{frac12}
underbrace{g'(XU_0)}_{Ntimes K}odot
underbrace{left[vphantom{int_0^1}left(
underbrace{h’left(vphantom{int_0^1}g(XU_0)W_0right)}_{Ntimes1}odotunderbrace{nabla_{h(vphantom{int_0^1}gleft(XU_0right)W_0)}mathcal{L}}_{Ntimes 1}
right)cdot underbrace{W^T}_{1times K}right]}_{Ntimes K}
right)$$
Итого $Dtimes K$, как и $U_0$
Схематически это можно представить следующим образом:

Backpropagation для двуслойной нейронной сети
Подробнее о предыдущих вычисленияхЕсли вы не уследили за вычислениями в предыдущем примере, давайте более подробно разберём его чуть более конкретную версию (для $g = h = sigma$).
Рассмотрим двуслойную нейронную сеть для классификации. Мы уже встречали ее ранее при рассмотрении линейно неразделимой выборки. Предсказания получаются следующим образом:
$$
widehat{y} = sigma(X^1 W^2) = sigmaBig(big(sigma(X^0 W^1 )big) W^2 Big).
$$
Пусть $W^1_0$ и $W^2_0$ — текущее приближение матриц весов. Мы хотим совершить шаг по градиенту функции потерь, и для этого мы должны вычислить её градиенты по $W^1$ и $W^2$ в точке $(W^1_0, W^2_0)$.
Прежде всего мы совершаем forward pass, в ходе которого мы должны запомнить все промежуточные представления: $X^1 = X^0 W^1_0$, $X^2 = sigma(X^0 W^1_0)$, $X^3 = sigma(X^0 W^1_0) W^2_0$, $X^4 = sigma(sigma(X^0 W^1_0) W^2_0) = widehat{y}$. Они понадобятся нам дальше.
Для полученных предсказаний вычисляется значение функции потерь:
$$
l = mathcal{L}(y, widehat{y}) = y log(widehat{y}) + (1-y) log(1-widehat{y}).
$$
Дальше мы шаг за шагом будем находить производные по переменным из всё более глубоких слоёв.
-
Градиент $mathcal{L}$ по предсказаниям имеет вид
$$
nabla_{widehat{y}}l = frac{y}{widehat{y}} — frac{1 — y}{1 — widehat{y}} = frac{y — widehat{y}}{widehat{y} (1 — widehat{y})},
$$где, напомним, $ widehat{y} = sigma(X^3) = sigmaBig(big(sigma(X^0 W^1_0 )big) W^2_0 Big)$ (обратите внимание на то, что $W^1_0$ и $W^2_0$ тут именно те, из которых мы делаем градиентный шаг).
-
Следующий слой — поэлементное взятие $sigma$. Как мы помним, при переходе через него градиент поэлементно умножается на производную $sigma$, в которую подставлено предыдущее промежуточное представление:
$$
nabla_{X^3}l = sigma'(X^3)odotnabla_{widehat{y}}l = sigma(X^3)left( 1 — sigma(X^3) right) odot frac{y — widehat{y}}{widehat{y} (1 — widehat{y})} =
$$$$
= sigma(X^3)left( 1 — sigma(X^3) right) odot frac{y — sigma(X^3)}{sigma(X^3) (1 — sigma(X^3))} =
y — sigma(X^3)
$$ -
Следующий слой — умножение на $W^2_0$. В этот момент мы найдём градиент как по $W^2$, так и по $X^2$. При переходе через умножение на матрицу градиент, как мы помним, умножается с той же стороны на транспонированную матрицу, а значит:
$$
color{blue}{nabla_{W^2_0}l} = (X^2)^Tcdot nabla_{X^3}l = (X^2)^Tcdot(y — sigma(X^3)) =
$$$$
= color{blue}{left( sigma(X^0W^1_0) right)^T cdot (y — sigma(sigma(X^0W^1_0)W^2_0))}
$$Аналогичным образом
$$
nabla_{X^2}l = nabla_{X^3}lcdot (W^2_0)^T = (y — sigma(X^3))cdot (W^2_0)^T =
$$$$
= (y — sigma(X^2W_0^2))cdot (W^2_0)^T
$$ -
Следующий слой — снова взятие $sigma$.
$$
nabla_{X^1}l = sigma'(X^1)odotnabla_{X^2}l = sigma(X^1)left( 1 — sigma(X^1) right) odot left( (y — sigma(X^2W_0^2))cdot (W^2_0)^T right) =
$$$$
= sigma(X^1)left( 1 — sigma(X^1) right) odotleft( (y — sigma(sigma(X^1)W_0^2))cdot (W^2_0)^T right)
$$ -
Наконец, последний слой — это умножение $X^0$ на $W^1_0$. Тут мы дифференцируем только по $W^1$:
$$
color{blue}{nabla_{W^1_0}l} = (X^0)^Tcdot nabla_{X^1}l = (X^0)^Tcdot big( sigma(X^1) left( 1 — sigma(X^1) right) odot (y — sigma(sigma(X^1)W_0^2))cdot (W^2_0)^Tbig) =
$$$$
= color{blue}{(X^0)^Tcdotbig(sigma(X^0W^1_0)left( 1 — sigma(X^0W^1_0) right) odot (y — sigma(sigma(X^0W^1_0)W_0^2))cdot (W^2_0)^Tbig) }
$$
Итоговые формулы для градиентов получились страшноватыми, но они были получены друг из друга итеративно с помощью очень простых операций: матричного и поэлементного умножения, в которые порой подставлялись значения заранее вычисленных промежуточных представлений.
Автоматизация и autograd
Итак, чтобы нейросеть обучалась, достаточно для любого слоя $f^k: X^{k-1}mapsto X^k$ с параметрами $W^k$ уметь:
- превращать $nabla_{X^k_0}mathcal{L}$ в $nabla_{X^{k-1}_0}mathcal{L}$ (градиент по выходу в градиент по входу);
- считать градиент по его параметрам $nabla_{W^k_0}mathcal{L}$.
При этом слою совершенно не надо знать, что происходит вокруг. То есть слой действительно может быть запрограммирован как отдельная сущность, умеющая внутри себя делать forward pass и backward pass, после чего слои механически, как кубики в конструкторе, собираются в большую сеть, которая сможет работать как одно целое.
Более того, во многих случаях авторы библиотек для глубинного обучения уже о вас позаботились и создали средства для автоматического дифференцирования выражений (autograd). Поэтому, программируя нейросеть, вы почти всегда можете думать только о forward-проходе, прямом преобразовании данных, предоставив библиотеке дифференцировать всё самостоятельно. Это делает код нейросетей весьма понятным и выразительным (да, в реальности он тоже бывает большим и страшным, но сравните на досуге код какой-нибудь разухабистой нейросети и код градиентного бустинга на решающих деревьях и почувствуйте разницу).
Но это лишь начало
Метод обратного распространения ошибки позволяет удобно посчитать градиенты, но дальше с ними что-то надо делать, и старый добрый SGD едва ли справится с обучением современной сетки. Так что же делать? О некоторых приёмах мы расскажем в следующей главе.
Время на прочтение
19 мин
Количество просмотров 285K
Тема нейронных сетей была уже ни раз освещена на хабре, однако сегодня я бы хотел познакомить читателей с алгоритмом обучения многослойной нейронной сети методом обратного распространения ошибки и привести реализацию данного метода.
Сразу хочу оговориться, что не являюсь экспертом в области нейронных сетей, поэтому жду от читателей конструктивной критики, замечаний и дополнений.
Теоретическая часть
Данный материал предполагает знакомство с основами нейронных сетей, однако я считаю возможным ввести читателя в курс темы без излишних мытарств по теории нейронных сетей. Итак, для тех, кто впервые слышит словосочетание «нейронная сеть», предлагаю воспринимать нейронную сеть в качестве взвешенного направленного графа, узлы ( нейроны ) которого расположены слоями. Кроме того, узел одного слоя имеет связи со всеми узлами предыдущего слоя. В нашем случае у такого графа будут иметься входной и выходной слои, узлы которых выполняют роль входов и
выходов соответственно. Каждый узел ( нейрон ) обладает активационной функцией — функцией, ответственной за вычисление сигнала на выходе узла ( нейрона ). Также существует понятие смещения, представляющего из себя узел, на выходе которого всегда появляется единица. В данной статье мы будем рассматривать процесс обучения нейронной сети, предполагающий наличие «учителя», то есть процесс обучения, при котором обучение происходит путем предоставления сети последовательности обучающих примеров с правильными откликами.
Как и в случае с большинством нейронных сетей, наша цель состоит в обучении сети таким образом, чтобы достичь баланса между способностью сети давать верный отклик на входные данные, использовавшиеся в процессе обучения ( запоминания ), и способностью выдавать правильные результаты в ответ на входные данные, схожие, но неидентичные тем, что были использованы при обучении ( принцип обобщения). Обучение сети методом обратного распространения ошибки включает в себя три этапа: подачу на вход данных, с последующим распространением данных в направлении выходов, вычисление и обратное распространение соответствующей ошибки и корректировку весов. После обучения предполагается лишь подача на вход сети данных и распространение их в направлении выходов. При этом, если обучение сети может являться довольно длительным процессом, то непосредственное вычисление результатов обученной сетью происходит очень быстро. Кроме того, существуют многочисленные вариации метода обратного распространения ошибки, разработанные с целью увеличения скорости протекания
процесса обучения.
Также стоит отметить, что однослойная нейронная сеть существенно ограничена в том, обучению каким шаблонам входных данных она подлежит, в то время, как многослойная сеть ( с одним или более скрытым слоем ) не имеет такого недостатка. Далее будет дано описание стандартной нейронной сети с обратным распространением ошибки.
Архитектура
На рисунке 1 показана многослойная нейронная сеть с одним слоем скрытых нейронов ( элементы Z ).
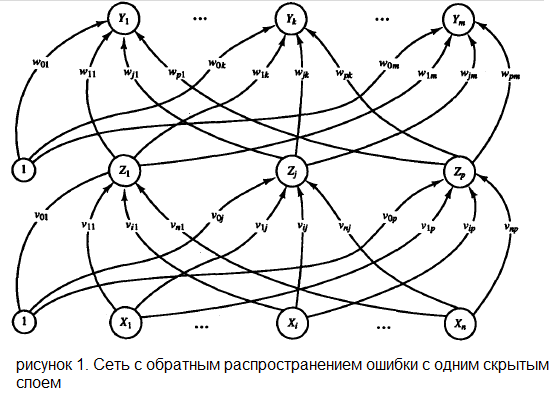
Нейроны, представляющие собой выходы сети ( обозначены  ), и скрытые нейроны могут иметь смещение( как показано на изображении ). Смещение, соответствующий выходу
), и скрытые нейроны могут иметь смещение( как показано на изображении ). Смещение, соответствующий выходу  обозначен
обозначен , скрытому элементу
, скрытому элементу  —
—  . Эти смещения служат в качестве весов на связях, исходящих от нейронов, на выходе которых всегда появляется 1 ( на рисунке 1 они показаны, но обычно явно не отображаются, подразумеваясь). Кроме того, на рисунке 1 стрелками показано перемещение информации в ходе фазы распространения данных от входов к выходам. В процессе обучения сигналы распространяются в обратном направлении.
. Эти смещения служат в качестве весов на связях, исходящих от нейронов, на выходе которых всегда появляется 1 ( на рисунке 1 они показаны, но обычно явно не отображаются, подразумеваясь). Кроме того, на рисунке 1 стрелками показано перемещение информации в ходе фазы распространения данных от входов к выходам. В процессе обучения сигналы распространяются в обратном направлении.
Описание алгоритма
Алгоритм, представленный далее, применим к нейронной сети с одним скрытым слоем, что является допустимой и адекватной ситуацией для большинства приложений. Как уже было сказано ранее, обучение сети включает в себя три стадии: подача на входы сети обучающих данных, обратное распространение ошибки и корректировка весов. В ходе первого этапа каждый входной нейрон  получает сигнал и широковещательно транслирует его каждому из скрытых нейронов
получает сигнал и широковещательно транслирует его каждому из скрытых нейронов  . Каждый скрытый нейрон затем вычисляет результат его активационной функции ( сетевой функции ) и рассылает свой сигнал
. Каждый скрытый нейрон затем вычисляет результат его активационной функции ( сетевой функции ) и рассылает свой сигнал  всем выходным нейронам. Каждый выходной нейрон , в свою очередь, вычисляет результат своей активационной функции
всем выходным нейронам. Каждый выходной нейрон , в свою очередь, вычисляет результат своей активационной функции  , который представляет собой ничто иное, как выходной сигнал данного нейрона для соответствующих входных данных. В процессе обучения, каждый нейрон на выходе сети сравнивает вычисленное значение с предоставленным учителем
, который представляет собой ничто иное, как выходной сигнал данного нейрона для соответствующих входных данных. В процессе обучения, каждый нейрон на выходе сети сравнивает вычисленное значение с предоставленным учителем  ( целевым значением ), определяя соответствующее значение ошибки для данного входного шаблона. На основании этой ошибки вычисляется
( целевым значением ), определяя соответствующее значение ошибки для данного входного шаблона. На основании этой ошибки вычисляется  .
.  используется при распространении ошибки от до всех элементов сети предыдущего слоя ( скрытых нейронов, связанных с ), а также позже при изменении весов связей между выходными нейронами и скрытыми. Аналогичным образом вычисляется
используется при распространении ошибки от до всех элементов сети предыдущего слоя ( скрытых нейронов, связанных с ), а также позже при изменении весов связей между выходными нейронами и скрытыми. Аналогичным образом вычисляется  для каждого скрытого нейрона . Несмотря на то, что распространять ошибку до входного слоя необходимости нет,
для каждого скрытого нейрона . Несмотря на то, что распространять ошибку до входного слоя необходимости нет,  используется для изменения весов связей между нейронами скрытого слоя и входными нейронами. После того как все
используется для изменения весов связей между нейронами скрытого слоя и входными нейронами. После того как все  были определены, происходит одновременная корректировка весов всех связей.
были определены, происходит одновременная корректировка весов всех связей.
Обозначения:
В алгоритме обучения сети используются следующие обозначения:
 Входной вектор обучающих данных
Входной вектор обучающих данных 
 Вектор целевых выходных значений, предоставляемых учителем
Вектор целевых выходных значений, предоставляемых учителем
Составляющая корректировки весов связей  , соответствующая ошибке выходного нейрона ; также, информация об ошибке нейрона , которая распространяется тем нейронам скрытого слоя, которые связаны с .
, соответствующая ошибке выходного нейрона ; также, информация об ошибке нейрона , которая распространяется тем нейронам скрытого слоя, которые связаны с .
Составляющая корректировки весов связей , соответствующая распространяемой от выходного слоя к скрытому нейрону информации об ошибке.
, соответствующая распространяемой от выходного слоя к скрытому нейрону информации об ошибке.
 Скорость обучения.
Скорость обучения.
 Нейрон на входе с индексом i. Для входных нейронов входной и выходной сигналы одинаковы — .
Нейрон на входе с индексом i. Для входных нейронов входной и выходной сигналы одинаковы — .
Смещение скрытого нейрона j.
Скрытый нейрон j; Суммарное значение подаваемое на вход скрытого элемента обозначается  :
: 
Сигнал на выходе ( результат применения к активационной функции ) обозначается : 
Смещение нейрона на выходе.
Нейрон на выходе под индексом k; Суммарное значение подаваемое на вход выходного элемента обозначается  :
:  . Сигнал на выходе ( результат применения к активационной функции ) обозначается :
. Сигнал на выходе ( результат применения к активационной функции ) обозначается :
Функция активации
Функция активация в алгоритме обратного распространения ошибки должна обладать несколькими важными характеристиками: непрерывностью, дифференцируемостью и являться монотонно неубывающей. Более того, ради эффективности вычислений, желательно, чтобы ее производная легко находилась. Зачастую, активационная функция также является функцией с насыщением. Одной из наиболее часто используемых активационных функций является бинарная сигмоидальная функция с областью значений в ( 0, 1 ) и определенная как:


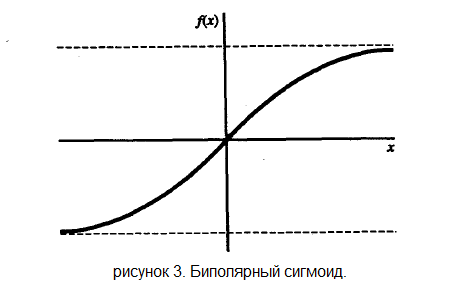
Другой широко распространенной активационной функцией является биполярный сигмоид с областью значений ( -1, 1 ) и определенный как:
Алгоритм обучения
Алгоритм обучения выглядит следующим образом:
Шаг 0.
Инициализация весов ( веса всех связей инициализируются случайными небольшими значениями ).
Шаг 1.
До тех пор пока условие прекращения работы алгоритма неверно, выполняются шаги 2 — 9.
Шаг 2.
Для каждой пары { данные, целевое значение } выполняются шаги 3 — 8.
Распространение данных от входов к выходам:
Шаг 3.
Каждый входной нейрон  отправляет полученный сигнал всем нейронам в следующем слое ( скрытом ).
отправляет полученный сигнал всем нейронам в следующем слое ( скрытом ).
Шаг 4.
Каждый скрытый нейрон  суммирует взвешенные входящие сигналы: и применяет активационную функцию: После чего посылает результат всем элементам следующего слоя ( выходного ).
суммирует взвешенные входящие сигналы: и применяет активационную функцию: После чего посылает результат всем элементам следующего слоя ( выходного ).
Шаг 5.
Каждый выходной нейрон  суммирует взвешенные входящие сигналы: и применяет активационную функцию, вычисляя выходной сигнал:
суммирует взвешенные входящие сигналы: и применяет активационную функцию, вычисляя выходной сигнал: 
Обратное распространение ошибки:
Шаг 6.
Каждый выходной нейрон получает целевое значение — то выходное значение, которое является правильным для данного входного сигнала, и вычисляет ошибку:  , так же вычисляет величину, на которую изменится вес связи :
, так же вычисляет величину, на которую изменится вес связи :  . Помимо этого, вычисляет величину корректировки смещения:
. Помимо этого, вычисляет величину корректировки смещения:  и посылает нейронам в предыдущем слое.
и посылает нейронам в предыдущем слое.
Шаг 7.
Каждый скрытый нейрон суммирует входящие ошибки ( от нейронов в последующем слое )  и вычисляет величину ошибки, умножая полученное значение на производную активационной функции:
и вычисляет величину ошибки, умножая полученное значение на производную активационной функции: 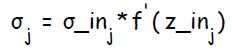 , так же вычисляет величину, на которую изменится вес связи :
, так же вычисляет величину, на которую изменится вес связи :  . Помимо этого, вычисляет величину корректировки смещения:
. Помимо этого, вычисляет величину корректировки смещения: 
Шаг 8. Изменение весов.
Каждый выходной нейрон изменяет веса своих связей с элементом смещения и скрытыми нейронами: 
Каждый скрытый нейрон изменяет веса своих связей с элементом смещения и выходными нейронами: 
Шаг 9.
Проверка условия прекращения работы алгоритма.
Условием прекращения работы алгоритма может быть как достижение суммарной квадратичной ошибкой результата на выходе сети предустановленного заранее минимума в ходе процесса обучения, так и выполнения определенного количества итераций алгоритма. В основе алгоритма лежит метод под названием градиентный спуск. В зависимости от знака, градиент функции ( в данном случае значение функции — это ошибка, а параметры — это веса связей в сети ) дает направление, в котором значения функции возрастают (или убывают) наиболее стремительно.
Выбор первоначальных весов и смещения
Случайная инициализация. Выбор начальных весов окажет влияние на то, сумеет ли сеть достичь глобального ( или только локального) минимума ошибки, и насколько быстро этот процесс будет происходить. Изменение весов между двумя нейронами связано с производной активационной функции нейрона из последующего слоя и активационной функции нейрона слоя предыдущего. В связи с этим, важно избегать выбора таких начальных весов, которые обнулят активационную функцию или ее производную. Также начальные веса не должны быть слишком большими ( или входные сигнал для каждого скрытого или выходного нейрона скорее всего попадут в регион очень малых значений сигмоида ( регион насыщения ) ). С другой стороны, если начальные веса будут слишком маленькими, то входной сигнал на скрытые или выходные нейроны будет близок к нулю, что также приведет к очень низкой скорости обучения. Стандартная процедура инициализации весов состоит в присвоении им случайных значений в интервале ( -0,5; 0,5). Значения могут быть как положительными, так и отрицательными, так как конечные веса, получающиеся после обучения сети, могут быть обоих знаков. Инициализация Nguyen – Widrow. Представленная далее простая модификация стандартной процедуру инициализации способствует более быстрому обучению: Веса связей скрытых и выходных нейронов, а также смещение выходного слоя инициализируются также, как и в стандартной процедуре — случайными значениями из интервала ( -0,5; 0,5).
Введем обозначения:
 количество входных нейронов
количество входных нейронов
 количество скрытых нейронов
количество скрытых нейронов
 фактор масштабирования:
фактор масштабирования:
Процедура состоит из следующих простых шагов:
Для каждого скрытого нейрона :
инициализировать его вектор весов ( связей с входными нейронами ):

вычислить 
переинициализировать веса: 
задать значение смещения: 
Практическая часть
Начну с реализации концепции нейрона. Было решено представить нейроны входного слоя базовым классом, а скрытые и выходные как декораторы базового класса. Кроме того, нейрон хранит в себе информацию об исходящих и входящих связях, а также каждый нейрон композиционно имеет в своем составе активационную функцию.
Интерфейс нейрона
/**
* Neuron base class.
* Represents a basic element of neural network, node in the net's graph.
* There are several possibilities for creation an object of type Neuron, different constructors suites for
* different situations.
*/
template <typename T>
class Neuron
{
public:
/**
* A default Neuron constructor.
* - Description: Creates a Neuron; general purposes.
* - Purpose: Creates a Neuron, linked to nothing, with a Linear network function.
* - Prerequisites: None.
*/
Neuron( ) : mNetFunc( new Linear ), mSumOfCharges( 0.0 ) { };
/**
* A Neuron constructor based on NetworkFunction.
* - Description: Creates a Neuron; mostly designed to create an output kind of neurons.
* @param inNetFunc - a network function which is producing neuron's output signal;
* - Purpose: Creates a Neuron, linked to nothing, with a specific network function.
* - Prerequisites: The existence of NetworkFunction object.
*/
Neuron( NetworkFunction * inNetFunc ) : mNetFunc( inNetFunc ), mSumOfCharges( 0.0 ){ };
Neuron( std::vector<NeuralLink<T > *>& inLinksToNeurons, NetworkFunction * inNetFunc ) :
mNetFunc( inNetFunc ),
mLinksToNeurons(inLinksToNeurons),
mSumOfCharges(0.0){ };
/**
* A Neuron constructor based on layer of Neurons.
* - Description: Creates a Neuron; mostly designed to create an input and hidden kinds of neurons.
* @param inNeuronsLinkTo - a vector of pointers to Neurons which is representing a layer;
* @param inNetFunc - a network function which is producing neuron's output signal;
* - Purpose: Creates a Neuron, linked to every Neuron in provided layer.
* - Prerequisites: The existence of std::vector<Neuron *> and NetworkFunction.
*/
Neuron( std::vector<Neuron *>& inNeuronsLinkTo, NetworkFunction * inNetFunc );
virtual ~Neuron( );
virtual std::vector<NeuralLink<T > *>& GetLinksToNeurons( ){ return mLinksToNeurons; };
virtual NeuralLink<T> * at( const int& inIndexOfNeuralLink ) { return mLinksToNeurons[ inIndexOfNeuralLink ]; };
virtual void SetLinkToNeuron( NeuralLink<T> * inNeuralLink ){ mLinksToNeurons.push_back( inNeuralLink ); };
virtual void Input( double inInputData ){ mSumOfCharges += inInputData; };
virtual double Fire( );
virtual int GetNumOfLinks( ) { return mLinksToNeurons.size( ); };
virtual double GetSumOfCharges( );
virtual void ResetSumOfCharges( ){ mSumOfCharges = 0.0; };
virtual double Process( ) { return mNetFunc->Process( mSumOfCharges ); };
virtual double Process( double inArg ){ return mNetFunc->Process( inArg ); };
virtual double Derivative( ){ return mNetFunc->Derivative( mSumOfCharges ); };
virtual void SetInputLink( NeuralLink<T> * inLink ){ mInputLinks.push_back( inLink ); };
virtual std::vector<NeuralLink<T > *>& GetInputLink( ){ return mInputLinks; };
virtual double PerformTrainingProcess( double inTarget );
virtual void PerformWeightsUpdating( );
virtual void ShowNeuronState( );
protected:
NetworkFunction * mNetFunc;
std::vector<NeuralLink<T > *> mInputLinks;
std::vector<NeuralLink<T > *> mLinksToNeurons;
double mSumOfCharges;
};
template <typename T>
class OutputLayerNeuronDecorator : public Neuron<T>
{
public:
OutputLayerNeuronDecorator( Neuron<T> * inNeuron ){ mOutputCharge = 0; mNeuron = inNeuron; };
virtual ~OutputLayerNeuronDecorator( );
virtual std::vector<NeuralLink<T > *>& GetLinksToNeurons( ){ return mNeuron->GetLinksToNeurons( ) ;};
virtual NeuralLink<T> * at( const int& inIndexOfNeuralLink ){ return ( mNeuron->at( inIndexOfNeuralLink ) ) ;};
virtual void SetLinkToNeuron( NeuralLink<T> * inNeuralLink ){ mNeuron->SetLinkToNeuron( inNeuralLink ); };
virtual double GetSumOfCharges( ) { return mNeuron->GetSumOfCharges( ); };
virtual void ResetSumOfCharges( ){ mNeuron->ResetSumOfCharges( ); };
virtual void Input( double inInputData ){ mNeuron->Input( inInputData ); };
virtual double Fire( );
virtual int GetNumOfLinks( ) { return mNeuron->GetNumOfLinks( ); };
virtual double Process( ) { return mNeuron->Process( ); };
virtual double Process( double inArg ){ return mNeuron->Process( inArg ); };
virtual double Derivative( ) { return mNeuron->Derivative( ); };
virtual void SetInputLink( NeuralLink<T> * inLink ){ mNeuron->SetInputLink( inLink ); };
virtual std::vector<NeuralLink<T > *>& GetInputLink( ) { return mNeuron->GetInputLink( ); };
virtual double PerformTrainingProcess( double inTarget );
virtual void PerformWeightsUpdating( );
virtual void ShowNeuronState( ) { mNeuron->ShowNeuronState( ); };
protected:
double mOutputCharge;
Neuron<T> * mNeuron;
};
template <typename T>
class HiddenLayerNeuronDecorator : public Neuron<T>
{
public:
HiddenLayerNeuronDecorator( Neuron<T> * inNeuron ) { mNeuron = inNeuron; };
virtual ~HiddenLayerNeuronDecorator( );
virtual std::vector<NeuralLink<T > *>& GetLinksToNeurons( ){ return mNeuron->GetLinksToNeurons( ); };
virtual void SetLinkToNeuron( NeuralLink<T> * inNeuralLink ){ mNeuron->SetLinkToNeuron( inNeuralLink ); };
virtual double GetSumOfCharges( ){ return mNeuron->GetSumOfCharges( ) ;};
virtual void ResetSumOfCharges( ){mNeuron->ResetSumOfCharges( ); };
virtual void Input( double inInputData ){ mNeuron->Input( inInputData ); };
virtual double Fire( );
virtual int GetNumOfLinks( ){ return mNeuron->GetNumOfLinks( ); };
virtual NeuralLink<T> * ( const int& inIndexOfNeuralLink ){ return ( mNeuron->at( inIndexOfNeuralLink) ); };
virtual double Process( ){ return mNeuron->Process( ); };
virtual double Process( double inArg ){ return mNeuron->Process( inArg ); };
virtual double Derivative( ){ return mNeuron->Derivative( ); };
virtual void SetInputLink( NeuralLink<T> * inLink ){ mNeuron->SetInputLink( inLink ); };
virtual std::vector<NeuralLink<T > *>& GetInputLink( ){ return mNeuron->GetInputLink( ); };
virtual double PerformTrainingProcess( double inTarget );
virtual void PerformWeightsUpdating( );
virtual void ShowNeuronState( ){ mNeuron->ShowNeuronState( ); };
protected:
Neuron<T> * mNeuron;
};
Интерфейс нейронных связей представлен ниже, каждая связь хранит вес и указатель на нейрон:
Интерфейс нейронной связи
template <typename T>
class Neuron;
template <typename T>
class NeuralLink
{
public:
NeuralLink( ) : mWeightToNeuron( 0.0 ),
mNeuronLinkedTo( 0 ),
mWeightCorrectionTerm( 0 ),
mErrorInformationTerm( 0 ),
mLastTranslatedSignal( 0 ){ };
NeuralLink( Neuron<T> * inNeuronLinkedTo, double inWeightToNeuron = 0.0 ) :
mWeightToNeuron( inWeightToNeuron ),
mNeuronLinkedTo( inNeuronLinkedTo ),
mWeightCorrectionTerm( 0 ),
mErrorInformationTerm( 0 ),
mLastTranslatedSignal( 0 ){ };
void SetWeight( const double& inWeight ){ mWeightToNeuron = inWeight; };
const double& GetWeight( ){ return mWeightToNeuron; };
void SetNeuronLinkedTo( Neuron<T> * inNeuronLinkedTo ){ mNeuronLinkedTo = inNeuronLinkedTo; };
Neuron<T> * GetNeuronLinkedTo( ){ return mNeuronLinkedTo; };
void SetWeightCorrectionTerm( double inWeightCorrectionTerm ){ mWeightCorrectionTerm = inWeightCorrectionTerm; };
double GetWeightCorrectionTerm( ){ return mWeightCorrectionTerm; };
void UpdateWeight( ){ mWeightToNeuron = mWeightToNeuron + mWeightCorrectionTerm; };
double GetErrorInFormationTerm( ){ return mErrorInformationTerm; };
void SetErrorInFormationTerm( double inEITerm ){ mErrorInformationTerm = inEITerm; };
void SetLastTranslatedSignal( double inLastTranslatedSignal ){ mLastTranslatedSignal = inLastTranslatedSignal; };
double GetLastTranslatedSignal( ){ return mLastTranslatedSignal; };
protected:
double mWeightToNeuron;
Neuron<T> * mNeuronLinkedTo;
double mWeightCorrectionTerm;
double mErrorInformationTerm;
double mLastTranslatedSignal;
};
Каждая активационная функция наследует от абстрактного класса, реализуя саму функцию и производную:
Интерфейс активационной функции
class NetworkFunction {
public:
NetworkFunction(){};
virtual ~NetworkFunction(){};
virtual double Process( double inParam ) = 0;
virtual double Derivative( double inParam ) = 0;
};
class Linear : public NetworkFunction {
public:
Linear(){};
virtual ~Linear(){};
virtual double Process( double inParam ){ return inParam; };
virtual double Derivative( double inParam ){ return 0; };
};
class Sigmoid : public NetworkFunction {
public:
Sigmoid(){};
virtual ~Sigmoid(){};
virtual double Process( double inParam ){ return ( 1 / ( 1 + exp( -inParam ) ) ); };
virtual double Derivative( double inParam ){ return ( this->Process(inParam)*(1 - this->Process(inParam)) );};
};
class BipolarSigmoid : public NetworkFunction {
public:
BipolarSigmoid(){};
virtual ~BipolarSigmoid(){};
virtual double Process( double inParam ){ return ( 2 / ( 1 + exp( -inParam ) ) - 1 ) ;};
virtual double Derivative( double inParam ){ return ( 0.5 * ( 1 + this->Process( inParam ) ) * ( 1 - this->Process( inParam ) ) ); };
};
За производство нейронов ответственна нейронная фабрика:
Интерфейс нейронной фабрики
template <typename T>
class NeuronFactory
{
public:
NeuronFactory(){};
virtual ~NeuronFactory(){};
virtual Neuron<T> * CreateInputNeuron( std::vector<Neuron<T > *>& inNeuronsLinkTo, NetworkFunction * inNetFunc ) = 0;
virtual Neuron<T> * CreateOutputNeuron( NetworkFunction * inNetFunc ) = 0;
virtual Neuron<T> * CreateHiddenNeuron( std::vector<Neuron<T > *>& inNeuronsLinkTo, NetworkFunction * inNetFunc ) = 0;
};
template <typename T>
class PerceptronNeuronFactory : public NeuronFactory<T>
{
public:
PerceptronNeuronFactory(){};
virtual ~PerceptronNeuronFactory(){};
virtual Neuron<T> * CreateInputNeuron( std::vector<Neuron<T > *>& inNeuronsLinkTo, NetworkFunction * inNetFunc ){ return new Neuron<T>( inNeuronsLinkTo, inNetFunc ); };
virtual Neuron<T> * CreateOutputNeuron( NetworkFunction * inNetFunc ){ return new OutputLayerNeuronDecorator<T>( new Neuron<T>( inNetFunc ) ); };
virtual Neuron<T> * CreateHiddenNeuron( std::vector<Neuron<T > *>& inNeuronsLinkTo, NetworkFunction * inNetFunc ){ return new HiddenLayerNeuronDecorator<T>( new Neuron<T>( inNeuronsLinkTo, inNetFunc ) ); };
};
Сама нейронная сеть хранит указатели на нейроны, организованные
слоями ( вообще, указатели на нейроны хранятся в векторах, которые
нужно заменить на объекты-слои ), включает в себя абстрактную
фабрику нейронов, а также алгоритм обучения сети.
Интерфейс нейронной сети
template <typename T>
class TrainAlgorithm;
/**
* Neural network class.
* An object of that type represents a neural network of several types:
* - Single layer perceptron;
* - Multiple layers perceptron.
*
* There are several training algorithms available as well:
* - Perceptron;
* - Backpropagation.
*
* How to use this class:
* To be able to use neural network , you have to create an instance of that class, specifying
* a number of input neurons, output neurons, number of hidden layers and amount of neurons in hidden layers.
* You can also specify a type of neural network, by passing a string with a name of neural network, otherwise
* MultiLayerPerceptron will be used. ( A training algorithm can be changed via public calls);
*
* Once the neural network was created, all u have to do is to set the biggest MSE required to achieve during
* the training phase ( or u can skip this step, then mMinMSE will be set to 0.01 ),
* train the network by providing a training data with target results.
* Afterwards u can obtain the net response by feeding the net with data;
*
*/
template <typename T>
class NeuralNetwork
{
public:
/**
* A Neural Network constructor.
* - Description: A template constructor. T is a data type, all the nodes will operate with. Create a neural network by providing it with:
* @param inInputs - an integer argument - number of input neurons of newly created neural network;
* @param inOutputs- an integer argument - number of output neurons of newly created neural network;
* @param inNumOfHiddenLayers - an integer argument - number of hidden layers of newly created neural network, default is 0;
* @param inNumOfNeuronsInHiddenLayers - an integer argument - number of neurons in hidden layers of newly created neural network ( note that every hidden layer has the same amount of neurons), default is 0;
* @param inTypeOfNeuralNetwork - a const char * argument - a type of neural network, we are going to create. The values may be:
* <UL>
* <LI>MultiLayerPerceptron;</LI>
* <LI>Default is MultiLayerPerceptron.</LI>
* </UL>
* - Purpose: Creates a neural network for solving some interesting problems.
* - Prerequisites: The template parameter has to be picked based on your input data.
*
*/
NeuralNetwork( const int& inInputs,
const int& inOutputs,
const int& inNumOfHiddenLayers = 0,
const int& inNumOfNeuronsInHiddenLayers = 0,
const char * inTypeOfNeuralNetwork = "MultiLayerPerceptron"
);
~NeuralNetwork( );
/**
* Public method Train.
* - Description: Method for training the network.
* - Purpose: Trains a network, so the weights on the links adjusted in the way to be able to solve problem.
* - Prerequisites:
* @param inData - a vector of vectors with data to train with;
* @param inTarget - a vector of vectors with target data;
* - the number of data samples and target samples has to be equal;
* - the data and targets has to be in the appropriate order u want the network to learn.
*/
bool Train( const std::vector<std::vector<T > >& inData,
const std::vector<std::vector<T > >& inTarget );
/**
* Public method GetNetResponse.
* - Description: Method for actually get response from net by feeding it with data.
* - Purpose: By calling this method u make the network evaluate the response for u.
* - Prerequisites:
* @param inData - a vector data to feed with.
*/
std::vector<int> GetNetResponse( const std::vector<T>& inData );
/**
* Public method SetAlgorithm.
* - Description: Setter for algorithm of training the net.
* - Purpose: Can be used for dynamic change of training algorithm.
* - Prerequisites:
* @param inTrainingAlgorithm - an existence of already created object of type TrainAlgorithm.
*/
void SetAlgorithm( TrainAlgorithm<T> * inTrainingAlgorithm ) { mTrainingAlgoritm = inTrainingAlgorithm; };
/**
* Public method SetNeuronFactory.
* - Description: Setter for the factory, which is making neurons for the net.
* - Purpose: Can be used for dynamic change of neuron factory.
* - Prerequisites:
* @param inNeuronFactory - an existence of already created object of type NeuronFactory.
*/
void SetNeuronFactory( NeuronFactory<T> * inNeuronFactory ) { mNeuronFactory = inNeuronFactory; };
/**
* Public method ShowNetworkState.
* - Description: Prints current state to the standard output: weight of every link.
* - Purpose: Can be used for monitoring the weights change during training of the net.
* - Prerequisites: None.
*/
void ShowNetworkState( );
/**
* Public method GetMinMSE.
* - Description: Returns the biggest MSE required to achieve during the training phase.
* - Purpose: Can be used for getting the biggest MSE required to achieve during the training phase.
* - Prerequisites: None.
*/
const double& GetMinMSE( ){ return mMinMSE; };
/**
* Public method SetMinMSE.
* - Description: Setter for the biggest MSE required to achieve during the training phase.
* - Purpose: Can be used for setting the biggest MSE required to achieve during the training phase.
* - Prerequisites:
* @param inMinMse - double value, the biggest MSE required to achieve during the training phase.
*/
void SetMinMSE( const double& inMinMse ){ mMinMSE = inMinMse; };
/**
* Friend class.
*/
friend class Hebb<T>;
/**
* Friend class.
*/
friend class Backpropagation<T>;
protected:
/**
* Protected method GetLayer.
* - Description: Getter for the layer by index of that layer.
* - Purpose: Can be used by inner implementation for getting access to neural network's layers.
* - Prerequisites:
* @param inInd - an integer index of layer.
*/
std::vector<Neuron<T > *>& GetLayer( const int& inInd ){ return mLayers[inInd]; };
/**
* Protected method size.
* - Description: Returns the number of layers in the network.
* - Purpose: Can be used by inner implementation for getting number of layers in the network.
* - Prerequisites: None.
*/
unsigned int size( ){ return mLayers.size( ); };
/**
* Protected method GetNumOfOutputs.
* - Description: Returns the number of units in the output layer.
* - Purpose: Can be used by inner implementation for getting number of units in the output layer.
* - Prerequisites: None.
*/
std::vector<Neuron<T > *>& GetOutputLayer( ){ return mLayers[mLayers.size( )-1]; };
/**
* Protected method GetInputLayer.
* - Description: Returns the input layer.
* - Purpose: Can be used by inner implementation for getting the input layer.
* - Prerequisites: None.
*/
std::vector<Neuron<T > *>& GetInputLayer( ){ return mLayers[0]; };
/**
* Protected method GetBiasLayer.
* - Description: Returns the vector of Biases.
* - Purpose: Can be used by inner implementation for getting vector of Biases.
* - Prerequisites: None.
*/
std::vector<Neuron<T > *>& GetBiasLayer( ) { return mBiasLayer; };
/**
* Protected method UpdateWeights.
* - Description: Updates the weights of every link between the neurons.
* - Purpose: Can be used by inner implementation for updating the weights of links between the neurons.
* - Prerequisites: None, but only makes sense, when its called during the training phase.
*/
void UpdateWeights( );
/**
* Protected method ResetCharges.
* - Description: Resets the neuron's data received during iteration of net training.
* - Purpose: Can be used by inner implementation for reset the neuron's data between iterations.
* - Prerequisites: None, but only makes sense, when its called during the training phase.
*/
void ResetCharges( );
/**
* Protected method AddMSE.
* - Description: Changes MSE during the training phase.
* - Purpose: Can be used by inner implementation for changing MSE during the training phase.
* - Prerequisites:
* @param inInd - a double amount of MSE to be add.
*/
void AddMSE( double inPortion ){ mMeanSquaredError += inPortion; };
/**
* Protected method GetMSE.
* - Description: Getter for MSE value.
* - Purpose: Can be used by inner implementation for getting access to the MSE value.
* - Prerequisites: None.
*/
double GetMSE( ){ return mMeanSquaredError; };
/**
* Protected method ResetMSE.
* - Description: Resets MSE value.
* - Purpose: Can be used by inner implementation for resetting MSE value.
* - Prerequisites: None.
*/
void ResetMSE( ) { mMeanSquaredError = 0; };
NeuronFactory<T> * mNeuronFactory; /*!< Member, which is responsible for creating neurons @see SetNeuronFactory */
TrainAlgorithm<T> * mTrainingAlgoritm; /*!< Member, which is responsible for the way the network will trained @see SetAlgorithm */
std::vector<std::vector<Neuron<T > *> > mLayers; /*!< Inner representation of neural networks */
std::vector<Neuron<T > *> mBiasLayer; /*!< Container for biases */
unsigned int mInputs, mOutputs, mHidden; /*!< Number of inputs, outputs and hidden units */
double mMeanSquaredError; /*!< Mean Squared Error which is changing every iteration of the training*/
double mMinMSE; /*!< The biggest Mean Squared Error required for training to stop*/
};
И, наконец, сам интерфейс класса, ответственного за обучение сети:
Интерфейс алгоритма обучения
template <typename T>
class NeuralNetwork;
template <typename T>
class TrainAlgorithm
{
public:
virtual ~TrainAlgorithm(){};
virtual double Train(const std::vector<T>& inData, const std::vector<T>& inTarget) = 0;
virtual void WeightsInitialization() = 0;
protected:
};
template <typename T>
class Hebb : public TrainAlgorithm<T>
{
public:
Hebb(NeuralNetwork<T> * inNeuralNetwork) : mNeuralNetwork(inNeuralNetwork){};
virtual ~Hebb(){};
virtual double Train(const std::vector<T>& inData, const std::vector<T>& inTarget);
virtual void WeightsInitialization();
protected:
NeuralNetwork<T> * mNeuralNetwork;
};
template <typename T>
class Backpropagation : public TrainAlgorithm<T>
{
public:
Backpropagation(NeuralNetwork<T> * inNeuralNetwork);
virtual ~Backpropagation(){};
virtual double Train(const std::vector<T>& inData, const std::vector<T>& inTarget);
virtual void WeightsInitialization();
protected:
void NguyenWidrowWeightsInitialization();
void CommonInitialization();
NeuralNetwork<T> * mNeuralNetwork;
};
Весь код доступен на github: Sovietmade/NeuralNetworks
В качестве заключения, хотелось бы отметить, что тема нейронных сетей на данный момент не разработана полностью, вновь и вновь мы видим на страницах хабра упоминания о новых достижениях ученых в области нейронных сетей, новых удивительных разработках. С моей стороны,
эта статья была первым шагом освоения интереснейшей технологии, и я надеюсь для кого — то она окажется небесполезной.
Использованная литература:
Алгоритм обучения нейронной сети был взят из изумительной книги:
Laurene V. Fausett “Fundamentals of Neural Networks: Architectures, Algorithms And Applications”.
Обратное распространение ошибки — это способ обучения нейронной сети. Цели обратного распространения просты: отрегулировать каждый вес пропорционально тому, насколько он способствует общей ошибке. Если мы будем итеративно уменьшать ошибку каждого веса, в конце концов у нас будет ряд весов, которые дают хорошие прогнозы.
Обновление правила цепочки
Прямое распространение можно рассматривать как длинный ряд вложенных уравнений. Если вы так думаете о прямом распространении, то обратное распространение — это просто приложение правила цепочки (дифференцирования сложной функции) для поиска производных потерь по любой переменной во вложенном уравнении. С учётом функции прямого распространения:
f(x)=A(B(C(x)))
A, B, и C — функции активации на различных слоях. Пользуясь правилом цепочки, мы легко вычисляем производную f(x) по x:
f′(x)=f′(A)⋅A′(B)⋅B′(C)⋅C′(x)
Что насчёт производной относительно B? Чтобы найти производную по B, вы можете сделать вид, что B (C(x)) является константой, заменить ее переменной-заполнителем B, и продолжить поиск производной по B стандартно.
f′(B)=f′(A)⋅A′(B)
Этот простой метод распространяется на любую переменную внутри функции, и позволяет нам в точности определить влияние каждой переменной на общий результат.
Применение правила цепочки
Давайте используем правило цепочки для вычисления производной потерь по любому весу в сети. Правило цепочки поможет нам определить, какой вклад каждый вес вносит в нашу общую ошибку и направление обновления каждого веса, чтобы уменьшить ошибку. Вот уравнения, которые нужны, чтобы сделать прогноз и рассчитать общую ошибку или потерю:

Учитывая сеть, состоящую из одного нейрона, общая потеря нейросети может быть рассчитана как:
Cost=C(R(Z(XW)))
Используя правило цепочки, мы легко можем найти производную потери относительно веса W.
C′(W)=C′(R)⋅R′(Z)⋅Z′(W)=(y^−y)⋅R′(Z)⋅X
Теперь, когда у нас есть уравнение для вычисления производной потери по любому весу, давайте обратимся к примеру с нейронной сетью:
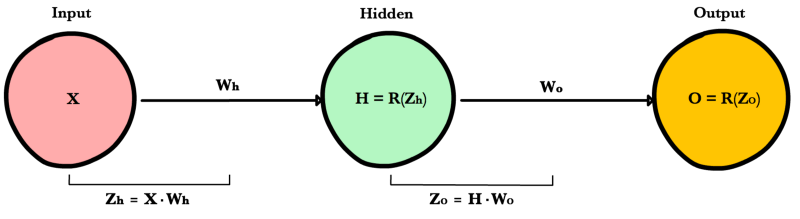
Какова производная от потери по Wo?
C′(WO)=C′(y^)⋅y^′(ZO)⋅Z′O(WO)=(y^−y)⋅R′(ZO)⋅H
А что насчет Wh? Чтобы узнать это, мы просто продолжаем возвращаться в нашу функцию, рекурсивно применяя правило цепочки, пока не доберемся до функции, которая имеет элемент Wh.
C′(Wh)=C′(y^)⋅O′(Zo)⋅Z′o(H)⋅H′(Zh)⋅Z′h(Wh)=(y^−y)⋅R′(Zo)⋅Wo⋅R′(Zh)⋅X
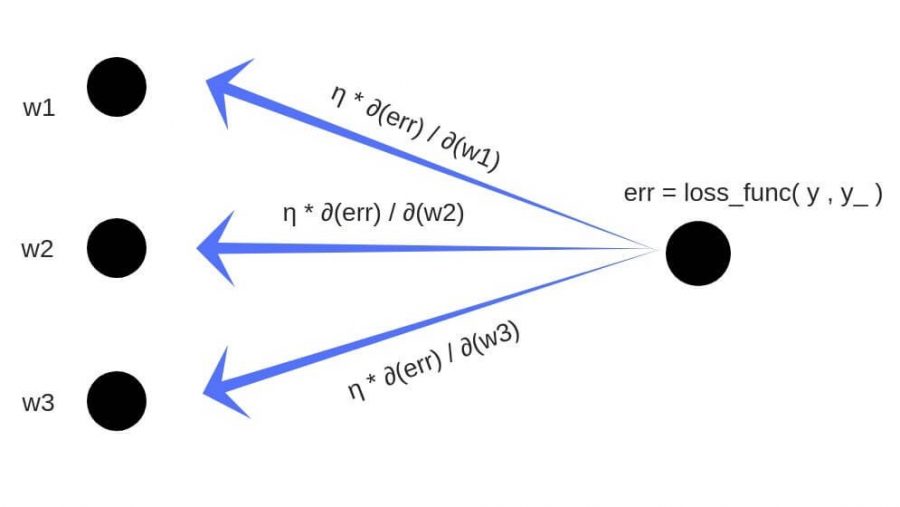
И просто забавы ради, что, если в нашей сети было бы 10 скрытых слоев. Что такое производная потери для первого веса w1?
C(w1)=(dC/dy^)⋅(dy^/dZ11)⋅(dZ11/dH10)⋅(dH10/dZ10)⋅(dZ10/dH9)⋅(dH9/dZ9)⋅(dZ9/dH8)⋅(dH8/dZ8)⋅(dZ8/dH7)⋅(dH7/dZ7)⋅(dZ7/dH6)⋅(dH6/dZ6)⋅(dZ6/dH5)⋅(dH5/dZ5)⋅(dZ5/dH4)⋅(dH4/dZ4)⋅(dZ4/dH3)⋅(dH3/dZ3)⋅(dZ3/dH2)⋅(dH2/dZ2)⋅(dZ2/dH1)⋅(dH1/dZ1)⋅(dZ1/dW1)
Заметили закономерность? Количество вычислений, необходимых для расчёта производных потерь, увеличивается по мере углубления нашей сети. Также обратите внимание на избыточность в наших расчетах производных. Производная потерь каждого слоя добавляет два новых элемента к элементам, которые уже были вычислены слоями над ним. Что, если бы был какой-то способ сохранить нашу работу и избежать этих повторяющихся вычислений?
Сохранение работы с мемоизацией
Мемоизация — это термин в информатике, имеющий простое значение: не пересчитывать одно и то же снова и снова. В мемоизации мы сохраняем ранее вычисленные результаты, чтобы избежать пересчета одной и той же функции. Это удобно для ускорения рекурсивных функций, одной из которых является обратное распространение. Обратите внимание на закономерность в уравнениях производных приведённых ниже.

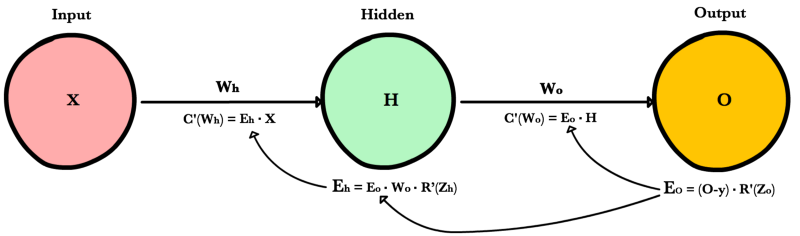
Каждый из этих слоев пересчитывает одни и те же производные! Вместо того, чтобы выписывать длинные уравнения производных для каждого веса, можно использовать мемоизацию, чтобы сохранить нашу работу, так как мы возвращаем ошибку через сеть. Для этого мы определяем 3 уравнения (ниже), которые вместе выражают в краткой форме все вычисления, необходимые для обратного распространения. Математика та же, но уравнения дают хорошее сокращение, которое мы можем использовать, чтобы отслеживать те вычисления, которые мы уже выполнили, и сохранять нашу работу по мере продвижения назад по сети.
Для начала мы вычисляем ошибку выходного слоя и передаем результат на скрытый слой перед ним. После вычисления ошибки скрытого слоя мы передаем ее значение обратно на предыдущий скрытый слой. И так далее и тому подобное. Возвращаясь назад по сети, мы применяем 3-ю формулу на каждом слое, чтобы вычислить производную потерь по весам этого слоя. Эта производная говорит нам, в каком направлении регулировать наши веса, чтобы уменьшить общие потери.
Примечание: термин ошибка слоя относится к производной потерь по входу в слой. Он отвечает на вопрос: как изменяется выход функции потерь при изменении входа в этот слой?
Ошибка выходного слоя
Для расчета ошибки выходного слоя необходимо найти производную потерь по входу выходному слою, Zo. Это отвечает на вопрос: как веса последнего слоя влияют на общую ошибку в сети? Тогда производная такова:
C′(Zo)=(y^−y)⋅R′(Zo)
Чтобы упростить запись, практикующие МО обычно заменяют последовательность (y^−y)∗R'(Zo) термином Eo. Итак, наша формула для ошибки выходного слоя равна:
Eo=(y^−y)⋅R′(Zo)
Ошибка скрытого слоя
Для вычисления ошибки скрытого слоя нужно найти производную потерь по входу скрытого слоя, Zh.
C′(Zh)=(y^−y)⋅R′(Zo)⋅Wo⋅R′(Zh)
Далее мы можем поменять местами элемент Eo выше, чтобы избежать дублирования и создать новое упрощенное уравнение для ошибки скрытого слоя:
Eh=Eo⋅Wo⋅R′(Zh)
Эта формула лежит в основе обратного распространения. Мы вычисляем ошибку текущего слоя и передаем взвешенную ошибку обратно на предыдущий слой, продолжая процесс, пока не достигнем нашего первого скрытого слоя. Попутно мы обновляем веса, используя производную потерь по каждому весу.
Производная потерь по любому весу
Вернемся к нашей формуле для производной потерь по весу выходного слоя Wo.
C′(WO)=(y^−y)⋅R′(ZO)⋅H
Мы знаем, что можем заменить первую часть уравнением для ошибки выходного слоя Eh. H представляет собой активацию скрытого слоя.
C′(Wo)=Eo⋅H
Таким образом, чтобы найти производную потерь по любому весу в нашей сети, мы просто умножаем ошибку соответствующего слоя на его вход (выход предыдущего слоя).
C′(w)=CurrentLayerError⋅CurrentLayerInput
Примечание: вход относится к активации с предыдущего слоя, а не к взвешенному входу, Z.
Подводя итог
Вот последние 3 уравнения, которые вместе образуют основу обратного распространения.
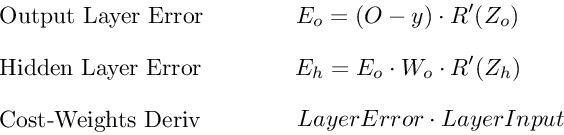
Вот процесс, визуализированный с использованием нашего примера нейронной сети выше:
Обратное распространение: пример кода
def relu_prime(z): if z > 0: return 1 return 0 def cost(yHat, y): return 0.5 * (yHat - y)**2 def cost_prime(yHat, y): return yHat - y def backprop(x, y, Wh, Wo, lr): yHat = feed_forward(x, Wh, Wo) # Layer Error Eo = (yHat - y) * relu_prime(Zo) Eh = Eo * Wo * relu_prime(Zh) # Cost derivative for weights dWo = Eo * H dWh = Eh * x # Update weights Wh -= lr * dWh Wo -= lr * dWo
Метод обратного распространения ошибок (англ. backpropagation) — метод вычисления градиента, который используется при обновлении весов в нейронной сети.
Содержание
- 1 Обучение как задача оптимизации
- 2 Дифференцирование для однослойной сети
- 2.1 Находим производную ошибки
- 3 Алгоритм
- 4 Недостатки алгоритма
- 4.1 Паралич сети
- 4.2 Локальные минимумы
- 5 Примечания
- 6 См. также
- 7 Источники информации
Обучение как задача оптимизации
Рассмотрим простую нейронную сеть без скрытых слоев, с двумя входными вершинами и одной выходной, в которых каждый нейрон использует линейную функцию активации, (обычно, многослойные нейронные сети используют нелинейные функции активации, линейные функции используются для упрощения понимания) которая является взвешенной суммой входных данных.
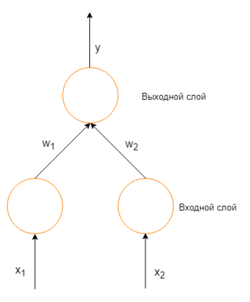
Простая нейронная сеть с двумя входными вершинами и одной выходной
Изначально веса задаются случайно. Затем, нейрон обучается с помощью тренировочного множества, которое в этом случае состоит из множества троек где и — это входные данные сети и — правильный ответ. Начальная сеть, приняв на вход и , вычислит ответ , который вероятно отличается от . Общепринятый метод вычисления несоответствия между ожидаемым и получившимся ответом — квадратичная функция потерь:
- где ошибка.
В качестве примера, обучим сеть на объекте , таким образом, значения и равны 1, а равно 0. Построим график зависимости ошибки от действительного ответа , его результатом будет парабола. Минимум параболы соответствует ответу , минимизирующему . Если тренировочный объект один, минимум касается горизонтальной оси, следовательно ошибка будет нулевая и сеть может выдать ответ равный ожидаемому ответу . Следовательно, задача преобразования входных значений в выходные может быть сведена к задаче оптимизации, заключающейся в поиске функции, которая даст минимальную ошибку.
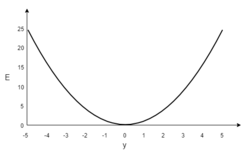
График ошибки для нейрона с линейной функцией активации и одним тренировочным объектом
В таком случае, выходное значение нейрона — взвешенная сумма всех его входных значений:
где и — веса на ребрах, соединяющих входные вершины с выходной. Следовательно, ошибка зависит от весов ребер, входящих в нейрон. И именно это нужно менять в процессе обучения. Распространенный алгоритм для поиска набора весов, минимизирующего ошибку — градиентный спуск. Метод обратного распространения ошибки используется для вычисления самого «крутого» направления для спуска.
Дифференцирование для однослойной сети
Метод градиентного спуска включает в себя вычисление дифференциала квадратичной функции ошибки относительно весов сети. Обычно это делается с помощью метода обратного распространения ошибки. Предположим, что выходной нейрон один, (их может быть несколько, тогда ошибка — это квадратичная норма вектора разницы) тогда квадратичная функция ошибки:
- где — квадратичная ошибка, — требуемый ответ для обучающего образца, — действительный ответ сети.
Множитель добавлен чтобы предотвратить возникновение экспоненты во время дифференцирования. На результат это не повлияет, потому что позже выражение будет умножено на произвольную величину скорости обучения (англ. learning rate).
Для каждого нейрона , его выходное значение определено как
Входные значения нейрона — это взвешенная сумма выходных значений предыдущих нейронов. Если нейрон в первом слое после входного, то входного слоя — это просто входные значения сети. Количество входных значений нейрона . Переменная обозначает вес на ребре между нейроном предыдущего слоя и нейроном текущего слоя.
Функция активации нелинейна и дифференцируема. Одна из распространенных функций активации — сигмоида:
у нее удобная производная:
Находим производную ошибки
Вычисление частной производной ошибки по весам выполняется с помощью цепного правила:
Только одно слагаемое в зависит от , так что
Если нейрон в первом слое после входного, то — это просто .
Производная выходного значения нейрона по его входному значению — это просто частная производная функции активации (предполагается что в качестве функции активации используется сигмоида):
По этой причине данный метод требует дифференцируемой функции активации. (Тем не менее, функция ReLU стала достаточно популярной в последнее время, хоть и не дифференцируема в 0)
Первый множитель легко вычислим, если нейрон находится в выходном слое, ведь в таком случае и
Тем не менее, если произвольный внутренний слой сети, нахождение производной по менее очевидно.
Если рассмотреть как функцию, берущую на вход все нейроны получающие на вход значение нейрона ,
и взять полную производную по , то получим рекурсивное выражение для производной:
Следовательно, производная по может быть вычислена если все производные по выходным значениям следующего слоя известны.
Если собрать все месте:
и
Чтобы обновить вес используя градиентный спуск, нужно выбрать скорость обучения, . Изменение в весах должно отражать влияние на увеличение или уменьшение в . Если , увеличение увеличивает ; наоборот, если , увеличение уменьшает . Новый добавлен к старым весам, и произведение скорости обучения на градиент, умноженный на , гарантирует, что изменения будут всегда уменьшать . Другими словами, в следующем уравнении, всегда изменяет в такую сторону, что уменьшается:
Алгоритм
- — скорость обучения
- — коэффициент инерциальности для сглаживания резких скачков при перемещении по поверхности целевой функции
- — обучающее множество
- — количество повторений
- — функция, подающая x на вход сети и возвращающая выходные значения всех ее узлов
- — количество слоев в сети
- — множество нейронов в слое i
- — множество нейронов в выходном слое
fun BackPropagation:
init
repeat :
for = to :
=
for :
=
for = to :
for :
=
for :
=
=
return
Недостатки алгоритма
Несмотря на многочисленные успешные применения обратного распространения, оно не является универсальным решением. Больше всего неприятностей приносит неопределённо долгий процесс обучения. В сложных задачах для обучения сети могут потребоваться дни или даже недели, она может и вообще не обучиться. Причиной может быть одна из описанных ниже.
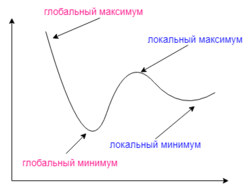
Градиентный спуск может найти локальный минимум вместо глобального
Паралич сети
В процессе обучения сети значения весов могут в результате коррекции стать очень большими величинами. Это может привести к тому, что все или большинство нейронов будут функционировать при очень больших выходных значениях, а производная активирующей функции будет очень мала. Так как посылаемая обратно в процессе обучения ошибка пропорциональна этой производной, то процесс обучения может практически замереть.
Локальные минимумы
Градиентный спуск с обратным распространением ошибок гарантирует нахождение только локального минимума функции; также, возникают проблемы с пересечением плато на поверхности функции ошибки.
Примечания
- Алгоритм обучения многослойной нейронной сети методом обратного распространения ошибки
- Neural Nets
- Understanding backpropagation
См. также
- Нейронные сети, перцептрон
- Стохастический градиентный спуск
- Настройка глубокой сети
- Практики реализации нейронных сетей
Источники информации
- https://en.wikipedia.org/wiki/Backpropagation
- https://ru.wikipedia.org/wiki/Метод_обратного_распространения_ошибки
Метод обратного распространения ошибки — метод обучения многослойного перцептрона. Впервые метод был описан в 1974 г. Полем Дж. Вербосом[1], а также независимо и одновременно А. И. Галушкиным[2]. Далее существенно развит в 1986 г. Дэвидом И. Румельхартом, Дж. Е. Хинтоном и Рональдом Дж. Вильямсом[3] и независимо и одновременно С. И. Барцевым и В. А. Охониным (Красноярская группа)[4]. Это итеративный градиентный алгоритм, который используется с целью минимизации ошибки работы многослойного перцептрона и получения желаемого выхода.
Основная идея этого метода состоит в распространении сигналов ошибки от выходов сети к её входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы. Барцев и Охонин предложили сразу общий метод («принцип двойственности»), приложимый к более широкому классу систем, включая системы с запаздыванием, распределённые системы, и т. п.[5]
Для возможноcти применения метода обратного распространения ошибки передаточная функция нейронов должна быть дифференцируема.
Cигмоидальные функции активации[]
Наиболее часто в качестве функций активации используются следующие виды сигмоид:
Функция Ферми (экспоненциальная сигмоида):

Рациональная сигмоида:

Гиперболический тангенс:

где s — выход сумматора нейрона, 
Менее всего, сравнительно с другими сигмоидами, процессорного времени требует расчет рациональной сигмоиды. Для вычисления гиперболического тангенса требуется больше всего тактов работы процессора. Если же сравнивать с пороговыми функциями активациями, то сигмоиды расчитываются очень медленно. Если после суммирования в пороговой функции сразу можно начинать сравнение с определенной величиной (порогом), то в случае сигмоидальной функции активации — нужно расчитать сигмоид (затратить время в лучшем случае на три операции: взятие модуля, сложение и деление), и только потом сравнивать с пороговой величиной (например, нулем). Если считать, что все простейшие операции расчитываются процессором за примерно одинаковое время, то работа сигмоидальной функции активации после произведенного суммирования (которое займет одинаковое время) будет медленее пороговой функции активации как 1:4.
Функция оценки работы сети[]
В тех случаях, когда удается оценить работу сети обучение нейронных сетей можно представить как задачу оптимизации. Оценить — означает указать количественно хорошо или плохо сеть решает поставленные ей задачи. Для этого строится функция оценки. Она, как правило, явно зависит от выходных сигналов сети и неявно (через функционирование) — от всех ее параметров. Простейший и самый распространенный пример оценки — сумма квадратов расстояний от выходных сигналов сети до их требуемых значений:

где 
Метод наименьших квадратов далеко не всегда является лучшим выбором оценки. Тщательное конструирование функции оценки позволяет на порядок поысить эффективность обучения сети, а также получать дополнительную информацию — «уровень уверенности» сети в даваемом ответе[6].
Описание алгоритма[]
Файл:Neuro.PNG Архитектура многослойного перцептрона
Алгоритм обратного распространения ошибки применяется для многослойного перцептрона. У сети есть входы 





Как модифицировать веса? Мы будем реализовывать стохастический градиентный спуск, то есть будем подправлять веса после каждого тестового примера. Нам нужно двигаться в сторону, противоположную градиенту, то есть добавлять к каждому весу

где

Производная считается следующим образом. Пусть сначала 


Аналогично, 


Если же j-й узел — не на последнем уровне, то у него есть выходы; обозначим их через Children(j). В этом случае

и

Ну а 



поправок алгоритм называется алгоритмом обратного распространения ошибки (backpropagation). Краткое резюме проделанной работы:
- для узла последнего уровня

- для внутреннего узла сети

- для всех узлов

Получающийся алгоритм представлен ниже. На вход алгоритму, кроме указанных параметров, нужно также подавать в каком-нибудь формате структуру сети. На практике очень хорошие результаты показывают сети достаточно простой структуры, состоящие из двух уровней нейронов — скрытого уровня (hidden units) и нейронов-выходов (output units); каждый вход сети соединен со всеми скрытыми нейронами, а результат работы каждого скрытого нейрона подается на вход каждому из нейронов-выходов. В таком случае достаточно подавать на вход количество нейронов скрытого уровня.
Алгоритм[]
Алгоритм:
BackPropagation 
- Инициализировать
маленькими случайными значениями.
- Повторить NUMBER_OF_STEPS раз:
- Для всех d от 1 до m:
- Подать
на вход сети и подсчитать выходы
- Для всех
.
- Для каждого уровня l, начиная с предпоследнего:
- Для каждого узла j уровня l вычислить
.
- Для каждого ребра сети {i, j}
.
- Выдать значения
.

Математическая интерпретация обучения нейронной сети[]
На каждой итерации алгоритма обратного распространения весовые коэффициенты нейронной сети модифицируются так, чтобы улучшить решение одного примера. Таким образом, в процессе обучения циклически решаются однокритериальные задачи оптимизации.
Обучение нейронной сети характеризуется четырьмя специфическими ограничениями, выделяющих обучение нейросетей из общих задач оптимизации: астрономическое число параметров, необходимость высокого параллелизма при обучении, многокритериальность решаемых задач, необходимость найти достаточно широкую область, в которой значения всех минимизируемых функций близки к минимальным. В остальном проблему обучения можно, как правило, сформулировать как задачу минимизации оценки. Осторожность предыдущей фразы («как правило») связана с тем, что на самом деле нам неизвестны и никогда не будут известны все возможные задачи для нейронных сетей, и, быть может, где-то в неизвестности есть задачи, которые несводимы к минимизации оценки. Минимизация оценки — сложная проблема: параметров астрономически много (для стандартных примеров, реализуемых на РС — от 100 до 1000000), адаптивный рельеф (график оценки как функции от подстраиваемых параметров) сложен, может содержать много локальных минимумов.
Недостатки алгоритма[]
Несмотря на многочисленные успешные применения обратного распространения, оно не является панацеей. Больше всего неприятностей приносит неопределенно долгий процесс обучения. В сложных задачах для обучения сети могут потребоваться дни или даже недели, она может и вообще не обучиться. Причиной может быть одна из описанных ниже.
Паралич сети[]
В процессе обучения сети значения весов могут в результате коррекции стать очень большими величинами. Это может привести к тому, что все или большинство нейронов будут функционировать при очень больших значениях OUT, в области, где производная сжимающей функции очень мала. Так как посылаемая обратно в процессе обучения ошибка пропорциональна этой производной, то процесс обучения может практически замереть. В теоретическом отношении эта проблема плохо изучена. Обычно этого избегают уменьшением размера шага η, но это увеличивает время обучения. Различные эвристики использовались для предохранения от паралича или для восстановления после него, но пока что они могут рассматриваться лишь как экспериментальные.
Локальные минимумы[]
Обратное распространение использует разновидность градиентного спуска, то есть осуществляет спуск вниз по поверхности ошибки, непрерывно подстраивая веса в направлении к минимуму. Поверхность ошибки сложной сети сильно изрезана и состоит из холмов, долин, складок и оврагов в пространстве высокой размерности. Сеть может попасть в локальный минимум (неглубокую долину), когда рядом имеется гораздо более глубокий минимум. В точке локального минимума все направления ведут вверх, и сеть неспособна из него выбраться. Статистические методы обучения могут помочь избежать этой ловушки, но они медленны.
Размер шага[]
Внимательный разбор доказательства сходимости[3] показывает, что коррекции весов предполагаются бесконечно малыми. Ясно, что это неосуществимо на практике, так как ведет к бесконечному времени обучения. Размер шага должен браться конечным, и в этом вопросе приходится опираться только на опыт. Если размер шага очень мал, то сходимость слишком медленная, если же очень велик, то может возникнуть паралич или постоянная неустойчивость. П. Д. Вассерман[7] описал адаптивный алгоритм выбора шага, автоматически корректирующий размер шага в процессе обучения. В книге А. Н. Горбаня[8] предложена разветвлённая технология оптимизации обучения.
См. также[]
- Сигмоид
- Многослойный перцептрон
Литература[]
- Уоссермен Ф. Нейрокомпьютерная техника: Теория и практика. — М.: «Мир», 1992.
- Хайкин С. Нейронные сети: Полный курс. Пер. с англ. Н. Н. Куссуль, А. Ю. Шелестова. 2-е изд., испр. — М.: Издательский дом Вильямс, 2008, 1103 с.
Внешние ссылки[]
- Копосов А.И., Щербаков И.Б., Кисленко Н.А., Кисленко О.П., Варивода Ю.В. и др. Отчет по научно-исследовательской работе «Создание аналитического обзора информационных источников по применению нейронных сетей для задач газовой технологии». — Москва: ВНИИГАЗ, 1995.
- Миркес Е. М., Нейроинформатика: Учеб. пособие для студентов с программами для выполнения лабораторных работ. Красноярск: ИПЦ КГТУ, 2002, 347 с. Рис. 58, табл. 59, библиогр. 379 наименований. ISBN 5-7636-0477-6
Примечания[]
- ↑ Werbos P. J., Beyond regression: New tools for prediction and analysis in the behavioral sciences. Ph.D. thesis, Harvard University, Cambridge, MA, 1974.
- ↑ Галушкин А. И. Синтез многослойных систем распознавания образов. — М.: «Энергия», 1974.
- ↑ 3,0 3,1 Rumelhart D.E., Hinton G.E., Williams R.J., Learning Internal Representations by Error Propagation. In: Parallel Distributed Processing, vol. 1, pp. 318—362. Cambridge, MA, MIT Press. 1986.
- ↑ Барцев С. И., Охонин В. А. Адаптивные сети обработки информации. Красноярск : Ин-т физики СО АН СССР, 1986. Препринт N 59Б. — 20 с.
- ↑ Барцев С. И., Гилев С. Е., Охонин В. А., Принцип двойственности в организации адаптивных сетей обработки информации, В кн.: Динамика химических и биологических систем. — Новосибирск: Наука, 1989. — С. 6-55.
- ↑ Миркес Е. М., — Новосибирск: Наука, Сибирская издательская фирма РАН, 1999. — 337 с. ISBN 5-02-031409-9 Другие копии онлайн: [1]
- ↑ Wasserman P. D. Experiments in translating Chinese characters using backpropagation. Proceedings of the Thirty-Third IEEE Computer Society International Conference.. — Washington: D. C.: Computer Society Press of the IEEE, 1988.
- ↑ Горбань А. Н. Обучение нейронных сетей.. — Москва: СП ПараГраф, 1990.